Робот коробка передач что это такое: что это такое, отличия от акпп, плюсы и минусы
что это такое, отличия от акпп, плюсы и минусы
Существует 4 вида коробок переключения передач (КПП). Доля автомобилей с роботизированной коробкой передач, классическим автоматом и вариатором на дорогах постоянно растет, ведь все больше автолюбителей отказываются от ручной механики. Коробки передач, работающие без участия человека, постоянно совершенствуются. Их качество, скорость реакции на дорожные события, плавность действий становятся лучше, а любая поездка комфортнее.
С роботизированной коробкой передач намного удобнее.Что такое роботизированная коробка передач
Роботизированная коробка передач (РКПП, или робот) — это часть трансмиссии транспортного средства. Иногда ее путают с автоматической коробкой, но они отличны друг от друга. РКПП состоит из механической КПП, автоматических переключателей электрического или гидравлического типа (актуаторы) и блока управления этими переключателями (ЭБУ). То есть сама коробка — механика, автоматическим является только управление ее работой.
Для водителя РКПП выглядит почти как АКПП. Под рукой нет рычага переключения скоростей (на некоторых моделях вместо него ручка селектора), а под ногами — педали сцепления. Во время езды передачи переключаются в автоматическом режиме.
Как она работает
Механической коробкой передач, снабженной диском сцепления с маховиком двигателя, управляет робот. Алгоритм, заложенный разработчиками в ЭБУ, реагирует на показания датчиков, подавая команды сервоприводам.
Это выглядит так:
- водитель давит на педаль газа;
- повышаются обороты двигателя, автомобиль ускоряется;
- по достижении заложенных в программу значений срабатывают актуаторы сцепления и вилки переключения;
- происходит включение повышенной передачи.


Если водитель продолжает ускорение, то на следующих запрограммированных оборотах двигателя и скорости движения ЭБУ снова подает сигнал и актуаторы опять переключают передачу.
По тому же принципу во время торможения передачи переключаются с высоких на пониженные. Высокопродуктивные процессоры позволяют создавать сложные программы, имитирующие поведение человека в разных ситуациях. И чем они сложнее, тем динамичнее и комфортнее езда.
Особенности РКПП
Работа роботизированной коробки передач.Главное отличие в том, что гидравлика работает быстрее и мягче. Но она более дорогая в производстве, поэтому такими РКПП снабжены в основном автомобили высокого класса. Самой востребованной является DSG от немецкого концерна Volkswagen.
ЭБУ для коробок делают и отдельным, и совмещенным с блоком управления ДВС. Последний вариант наиболее целесообразен, если алгоритм управления робота учитывает показания тех же систем, что и управление двигателем, например ABS или ESP.
Устройство сцепления в роботе
Роботизированные коробки по методу взаимодействия с двигателем бывают двух типов:
- однодисковые;
- двухдисковые (используют два сцепления, включаемые попеременно).
Однодисковая коробка ничем не отличается от механической. В ней есть первичный и вторичный валы.
Первичный соединен с диском сцепления. Вторичный вал передает крутящий момент непосредственно на колеса. Оба вала взаимодействуют посредством шестерней разного диаметра. Переключение происходит в тот момент, когда выбранная для нужной передачи шестерня на вторичном валу блокируется. В РКПП это делают электрические манипуляторы, получающие сигнал от ЭБУ. Гидравлические приводы-манипуляторы на однодисковых коробках используются крайне редко.
Двухдисковые имеют два ведущих первичных вала, каждый из которых соединен со своим диском сцепления. Один вал отвечает за четные передачи, а второй — за нечетные и заднюю. Такое техническое решение позволило делать включение выбранной передачи более плавным. Синхронизаторы приводов работают попеременно. В момент перехода на одном валу с 1 на 2 передачу ЭБУ уже дает сигнал на подготовку к включению 3. Поэтому их еще называют преселективными, т. е. с предварительным выбором. В результате сам процесс переключения ускоряется до 0,2 и менее секунд.
Некоторые производители так настраивают работу актуаторов и алгоритмы, что робот функционирует не хуже человека.
Режимы работы
Управление водителем коробкой передач сводится к выбору режима селектором:
- Нейтраль обозначается «N». В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.
- Движение вперед обозначается «А/М», «Е/М» или «D». Включив этот режим, отпускают педаль тормоза и нажимают педаль газа. Машина движется вперед, автоматически переключая скорости в зависимости от ускорения или торможения.
- Ручное управление обозначается «М». Автомобиль движется вперед, водитель самостоятельно переключает скорости, нажимая подрулевые лепестки или селектор в положения «+» или «-». При этом переключение происходит только на одну ступень.
- Движение задним ходом обозначается «R». Выбрав этот режим, можно ехать назад.
- На некоторых РКПП возможно наличие режимов «зимний» и «спортивный».
 В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.
В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.Есть также и свои особенности при езде, к которым водитель должен привыкнуть, иначе будет попадать в неприятные ситуации.
Это следующее:
- Езда в автоматическом режиме подразумевает дороги с хорошим твердым покрытием. Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок.
- Педаль газа нужно нажимать плавно, ни в коем случае нельзя ее давить в пол. Нужно следить за оборотами двигателя, фиксируя моменты переключения скоростей, и избегать перегазовки.
- Если на авто отсутствует функция помощи при трогании в подъем, нужно поступать так же, как при пользовании ручной КПП, — использовать стояночный тормоз для предотвращения отката назад.
- При длительных остановках (больше 60 секунд) на запрещающий сигнал светофора или в пробке нужно переключать селектор в положение «нейтраль».
- Для длительной остановки на парковке сначала переводят селектор в «нейтраль», затем включают стояночный тормоз, после чего отпускают педаль тормоза и глушат двигатель.
- Каждый производитель указывает, с какой частотой по пробегу нужно проводить перекалибровку ЭБУ (ее еще называют инициализацией или обучением). Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.
- Зимой, при низких температурах воздуха, прогрев коробки занимает ровно столько времени, сколько его потребуется на прогрев двигателя.
 Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок.
Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок. Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.
Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.Основные отличия РКПП от АКПП
Оба вида трансмиссии выполняют одну функцию — освобождают водителя от необходимости переключения передач во время движения автомобиля.
Но из-за того, что конструктивно это разные механизмы, в эксплуатации и обслуживании они отличаются друг от друга:
- В АКПП частью рабочего механизма является жидкость ATF. В РКПП для смазки механических узлов присутствует масло, но его в несколько раз меньше по объему. Кроме того, его надо гораздо реже менять.
- Автомобиль с роботом динамичнее в движении и потребляет меньше топлива. Потому что масса и габариты автомата превосходят те же показатели у робота, а переключения скоростей в РКПП происходят быстрее.
- На машине с АКПП ездить гораздо комфортнее, потому что передачи переключаются плавно, а роботизированная коробка не может так гасить рывки.
- Износ фрикционов идет медленнее, чем стирание диска сцепления.
- На роботизированной коробке можно переключиться на ручное управление. Оно не полное, потому что переключение производится только на одно положение и нельзя перейти, например, со 2 сразу на 4. Но автомат не дает водителю и такой возможности.
 Кроме того, его надо гораздо реже менять.
Кроме того, его надо гораздо реже менять.Плюсы и минусы
Схема работы системы SensoDrive.Широкое распространение роботизированные коробки передач получили благодаря своим достоинствам. Однако у них есть и недостатки, о которых лучше знать до покупки автомобиля, чтобы быть к ним готовым.

Преимущества:
- Время разгона до 100 км/ч при аналогичности других параметров почти не отличается от времени разгона на ручной коробке.
- Расход топлива сопоставим с расходом на автомобилях с РКПП и до 30% ниже, чем на моделях с автоматическими коробками.
- Диск сцепления изнашивается медленнее, чем при ручном переключении.
- Робот работает аккуратнее человека, поэтому валы и шестерни коробки будут изнашиваться меньше, а служить дольше, чем в ручной механике.
- Стоимость ремонта и обслуживания в среднем ниже, чем у АКПП.
Отрицательные моменты:
- Во время движения при включении скоростей могут ощущаться рывки и дерганье.
- Алгоритм, заложенный в ЭБУ, не обладает реакцией человека на ситуации, возникающие во время движения. Поэтому могут возникать ошибки, когда необходимо экстренно разогнаться или затормозить.
- Роботу для принятия решения нужны более «длинные» передачи, а для сохранения динамики при этом необходим более мощный двигатель.
- Если нет системы помощи при подъеме, то во время начала движения «в гору» возможен откат автомобиля назад.
- Невозможность «прошивки» блока управления. Алгоритм переключения передач — это разработка производителя, которая корректировке не подлежит.
- Движение в пробках плохо сказывается на узлах и механизмах коробки, приводя их к раннему разрушению.

Признаки неисправности
Как и любой механизм, роботизированная коробка подвержена износу во время работы и может ломаться. Неисправности делятся на механические и блока управления. Каждая имеет свои проявления.
Признаки механических поломок:
- пробуксовка во время движения по ровному твердому дорожному полотну говорит об износе диска сцепления;
- если не переключаются передачи, это может говорить о поломке актуаторов;
- посторонние шумы во время движения могут быть вызваны целым рядом причин, и для выявления поломки следует провести диагностику узлов и механизмов;
- усиление рывков во время переключения передач может происходить из-за износа и разрушения зубчатых соединений на валах коробки, износа вилок выбора шестеренок;
- загоревшаяся лампа Check Engine на панели приборов говорит о необходимости компьютерной диагностики.

Признаки ошибок в ЭБУ:
- сбивается режим работы робота, переключения передач происходят некорректно и не вовремя;
- рывки во время включения передач становятся сильнее;
- при выборе селектором положения движения вперед или назад машина не едет;
- загорается контрольная лампочка Check Engine.
Чтобы разобраться, из-за чего возникли неприятности, нужно провести правильную диагностику с применением специального оборудования.
Актуальность коробки в России
Автомобили с коробками-роботами у наших автолюбителей пользуются хорошим спросом. Опросы показывают, что доля россиян, готовых купить авто с РКПП, колеблется в пределах 15-20%. При этом надо отметить, что доля желающих пользоваться классическим автоматом все же в 2 раза выше.
При этом надо отметить, что доля желающих пользоваться классическим автоматом все же в 2 раза выше.
В крупных городах платежеспособные слои населения выбирают АКПП из-за более комфортной езды и гораздо меньших проблем, связанных с эксплуатацией в условиях частых пробок на дорогах. Притом цены на автомат и хороший преселективный агрегат находятся на одном уровне. Но, если цена на горючее будет продолжать расти, многие предпочтут авто с РКПП (как более дешевый в эксплуатации), особенно когда поездки не ограничиваются маршрутом работа-дом.
Чем отличается робот от автомата в автомобиле: конструкция и принцип работы
Производители выпускают автомобили с несколькими типами трансмиссии: с механической (МКПП), автоматической (АКПП) и роботизированной (РКПП) коробками переключения передач. Каждый из этих типов имеет свои достоинства и недостатки. Использование АКПП и РКПП становится все более популярным и востребованным в городах с плотным трафиком. Автолюбители интересуются, что лучше выбрать: коробку робот или автомат, в чем разница между ними.
Визуальное отличие автомата от робота
Для того чтобы определить тип переключения передач, нужно начать с внешнего осмотра машины. Автомобиль с автоматической трансмиссией имеет на кузове маркировку А или АТ.
Далее стоит обратить внимание на внешний вид консоли.
Режимы работы автомата обозначаются буквами:
- Р (Park) — парковка;
- R (Reverse) — задний ход;
- N (Neutral) — нейтральная передача;
- D (Drive) — движение вперед.
Консоль РКПП имеет другие режимы:
- N (Neutral) — нейтральная передача;
- R (Reverse) — задний ход;
- A/M или E/M — движение вперед;
- +/- — переключение передач (используется при ручном управлении).
Основные отличия
Главное отличие автоматической коробки передач — это наличие положения Р (парковка) на консоли.
Если есть возможность, следует изучить на сайте производителя информацию о том, какие типы трансмиссии имеет данная модель.
На автомобиле с РКПП нет щупа. Замена масла возможна только в техцентре.
Мировые концерны ведут разработки новых типов коробок передач, уже выпускаются экземпляры с роботом второго поколения DSG. Отличить ДСГ от автомата визуально невозможно, так как консоли выглядят одинаково.
Достоверно определить тип трансмиссии можно по характеру езды. Машина с АКПП едет более плавно, без рывков.
Ресурс коробки-автомат может быть разным. Если в одном автомобиле трансмиссия прослужит 100 тысяч км.,то в другом – порядка 500 тысяч.
Преимущества и недостатки трансмиссий
С конструктивной точки зрения автоматическая и роботизированная коробки переключения передач — это разные типы трансмиссии.
Автомат — гидромеханический агрегат. Переключение происходит за счет гидротрансформатора. Управление осуществляется электроникой. Робот представляет собой усовершенствованную МКПП, но передачи переключаются не водителем, а с помощью электронного блока управления.
Достоинства и недостатки роботизированной коробки передач
Роботизированная коробка переключения передач объединяет в себе надежность механики и удобство автомата.
К преимуществам РКПП относятся:
- Удобство. Передачи переключаются автоматически. Машина не откатывается при трогании в горку, что имеет значение для малоопытных водителей.
- Относительно невысокая стоимость самого агрегата, а также его ремонта, т. к. трансмиссия является механической.
- Экономный расход топлива.
- Небольшое количество масла (около 2-3 л).
- Меньший вес относительно АКПП.
- Возможность буксировки автомобиля в случае его поломки.
- Возможность переключить РКПП на ручное управление, хотя автоматика будет продолжать контролировать действия водителя.
У данной трансмиссии есть и недостатки: медленный разгон, некоторая заторможенность на старте. Во время разгона водитель может ощущать рывки, как при МКПП. При каждой остановке (на светофоре, в пробке и т. д.) нужно устанавливать рычаг в нейтральное положение.
д.) нужно устанавливать рычаг в нейтральное положение.
Плюсы и минусы коробки-автомат
Классический автомат является самым популярным типом трансмиссии в современном автомобилестроении. Он устанавливается как на легковых, так и на грузовых автомобилях.
Главные преимущества АКПП — это ее удобство и высокая надежность. За счет 7, 8 или 9 ступеней обеспечиваются плавность хода и комфортность в управлении. К достоинствам также относится низкое потребление топлива. АКПП обеспечивает бережливую эксплуатацию двигателя за счет переключения передач на оптимальных оборотах. Есть пассивная система безопасности, которая препятствует откату автомобиля назад на склоне. При бережной эксплуатации, правильном обслуживании такая коробка передач прослужит долго.
Среди недостатков данного типа трансмиссии выделим:
- Высокую цену как самого агрегата, так и его ремонта.
- Менее динамичный разгон относительно МКПП.
- Более низкий КПД автомата из-за гидротрансформатора, который поглощает часть мощности.
- Наличие около 10 л масла для работы АКПП.
- Высокое потребление топлива по сравнению с РКПП, в которой оно расходуется более экономно.
- Запрет на буксировку автомобиля. В случае поломки машину можно перемещать только на эвакуаторе.
Какую коробку лучше выбрать
Обе трансмиссии обеспечивают комфорт передвижения, простоту управления. Педаль сцепления отсутствует и в том и в другом варианте. Автопроизводители продолжают выпускать машины с различными видами коробок передач под разных потребителей. Однозначного ответа, что лучше, нет. Водитель делает выбор исходя из своих предпочтений.
Если выбирать по уровню комфорта, то АКПП является предпочтительным вариантом, т.
 к. обеспечивает плавность хода. Кроме того, РКПП в пробках нужно ставить в положение N (Neutral), при АКПП такой необходимости нет.
к. обеспечивает плавность хода. Кроме того, РКПП в пробках нужно ставить в положение N (Neutral), при АКПП такой необходимости нет.С экономической точки зрения роботизированная коробка передач выигрывает перед автоматической. РКПП дешевле, а цена обслуживания и ремонта ниже. Кроме того, для робота требуется меньше масла, а за счет повышенного КПД расход топлива также меньше. Исходя из экономических соображений, автоэксперты сходятся во мнении, что за роботами и ДСГ будущее, т. к. потребители отдают предпочтение дешевым моделям.
С точки зрения надежности и автомат, и робот уступают механической коробке. РКПП стоит выбирать, если автомобиль будет передвигаться преимущественно по дорогам с качественным асфальтовым покрытием. Автомат признан автолюбителями в качестве наиболее предсказуемой системы переключения передач.
Роботизированную коробку можно переключить в ручной режим управления. Таким образом водитель сможет самостоятельно понизить или повысить передачу в режиме движения. На машинах с АКПП без типтроника такая возможность отсутствует.
На машинах с АКПП без типтроника такая возможность отсутствует.
Учитывая свои предпочтения, сравнительную характеристику и особенности трансмиссий, каждый автолюбитель сможет выбрать вид коробки переключения передач, который ему подходит.
Роботизированная коробка передач (робот) что это? Как работает: плюсы, минусы
Коробка робот: преимущества, недостатки
Еще совсем недавно рядовой автолюбитель не имел свободы выбора трансмиссии с покупкой автомобиля. Технологический прогресс последних лет подарил несколько интересных систем – это и вариатор, и роботизированная коробка. Техническая реализация коробки-робота велась еще в 20 лет назад, однако внедрение этой трансмиссии в массы произошло сравнительно недавно. Первую версию агрегата немецкие инженеры выпустили в 2002 году. С тех пор было придумано немалое количество его разных вариаций и модификаций.
Первую версию агрегата немецкие инженеры выпустили в 2002 году. С тех пор было придумано немалое количество его разных вариаций и модификаций.
Конструкция и принцип работы роботизированной коробки
В конструктивном плане коробка-робот идентична с обычной «механикой». Вся разница заключается в том, что подбор и переключение передач в ней это полностью автоматизированный процесс. Фактически это значит, что есть некий «мозг», который и отвечает за включение нужной скорости. Причем процесс смыкания/размыкания сцепления практически не заметен и не ощутим. Поэтому водители авто с роботом отмечают высокий уровень комфорта, простоту использования и динамичность.
Особенность робота заключается и в том, что эта коробка может совмещать как одно, так и сразу два сцепления. Внедрив в конструкцию дополнительный механизм разъединения трансмиссии от двигателя, инженеры попытались снизить негативный эффект провалов тяги. Двойное сцепление реализовано в коробках по типу DSG или Powershift. Такие коробки еще называют преселективными или «предварительно выбирающими». Они позволяют при включенной скорости выбрать следующую передачу без перерыва в работе КПП. На авто с такими коробками передача крутящего момента происходит без потерь, так как нет разрыва потока мощности.
Такие коробки еще называют преселективными или «предварительно выбирающими». Они позволяют при включенной скорости выбрать следующую передачу без перерыва в работе КПП. На авто с такими коробками передача крутящего момента происходит без потерь, так как нет разрыва потока мощности.
Стоит ли приобретать автомобиль с преселективной коробкой?
Как и в случае с автоматической коробкой, функционирование робота невозможно без наличия электронной системы. Датчики следят за определенными рабочими характеристиками коробки, передают информацию блоку управления, где формируются команды исполнительным механизмам с учетом прописанных алгоритмов. Предусмотрен и ручной режим работы (как Типтроник на АКПП), благодаря которому водитель имеет возможность переключать передачи за счет органов управления – селектор или переключатели, расположенные под рулем.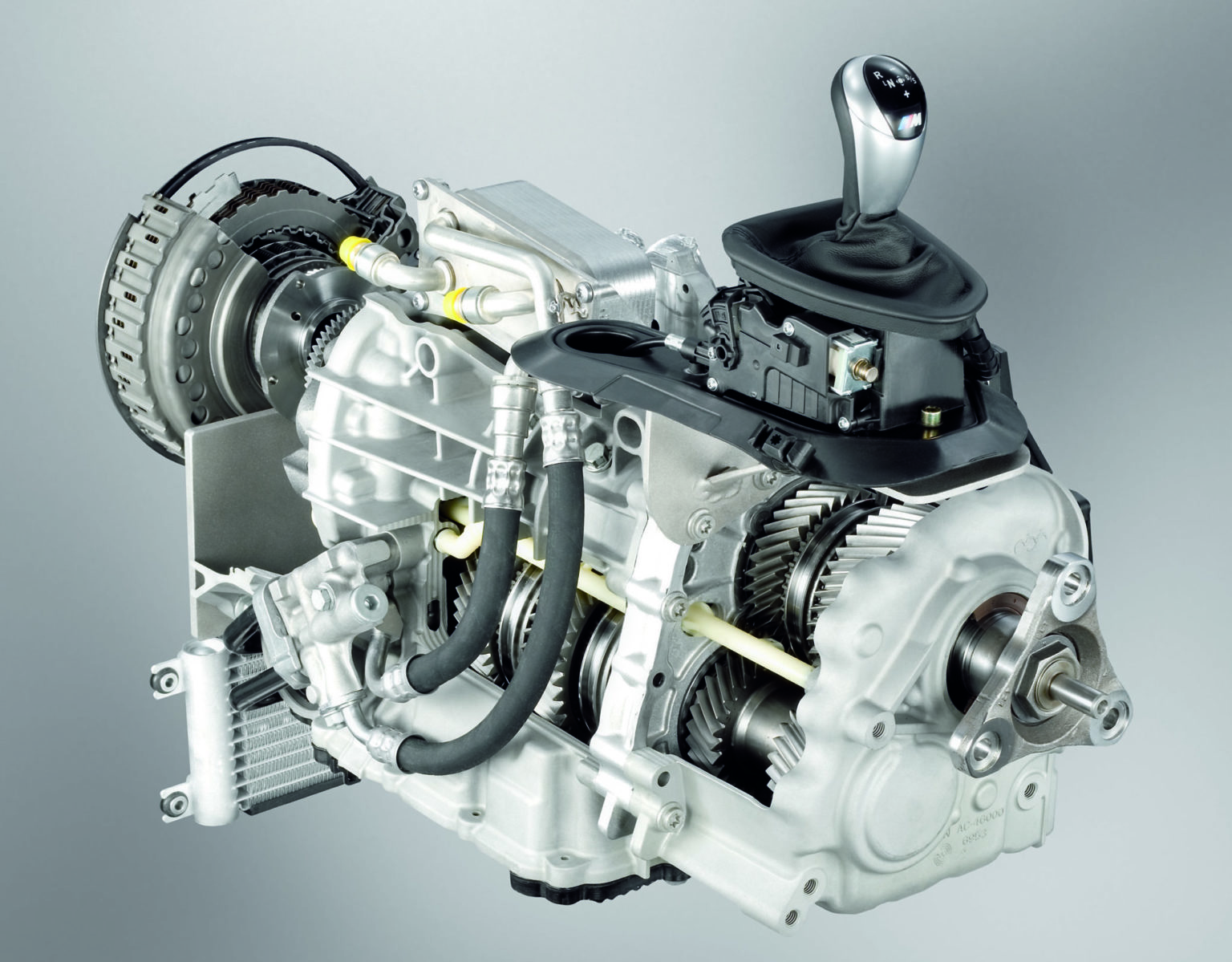
Разновидности роботизированных коробок
Нередко робот является агрегатом, сконструированным на базе готового решения. Часто за основу узла инженеры берут гидромеханический автомат и внедряют фрикционное многодисковое сцепление. Также возможен вариант, когда классическая «механика» получает привод гидравлического или механического типа.
Коробка робот с электрическим приводом считается более простым и дешевым решением. Его основной недостаток – низкая скорость работы (0.3-0.5 с) с одновременным небольшим энергопотреблением. В такой коробке исполнительными механизмами выступают сервоприводы и механическая передача. В гидравлике задействованы специальные гидроцилиндры, которыми управляют электромагнитные клапаны.
Коробка с гидравликой работает шустрее, однако её функционирование подразумевает наличие в системе жидкости под давлением. Поддержка постоянного давления требует серьёзных энергетических затрат. Тем не менее, робот с гидравлическим приводом нашел свое применение на многих спортивных автомобилях, таких как Lamborghini Aventador, Ferrari 599GTO. Также его ставят на машины из среднего и премиум сегмента. Робот с электрическим приводом не составит труда обнаружить на недорогой современной машине. Рассмотрим детально распространенные модификации РКПП с двойным сцеплением.
Также его ставят на машины из среднего и премиум сегмента. Робот с электрическим приводом не составит труда обнаружить на недорогой современной машине. Рассмотрим детально распространенные модификации РКПП с двойным сцеплением.
DSG
Роботизированная коробка DSG считается наиболее «продвинутой» версией автомата. Её легко встретить на автомобилях концерна VAG. Пожалуй, это самая распространенная модификация РКПП с двойным сцеплением. То есть, это преселективная трансмиссия, переключающая передачи крайне быстро (буквально за доли секунд). Эффективность работы DSG значительно выше обычной АКПП. В ней первое сцепление отвечает за нечетные передачи, а второе за четные. В свою очередь коробки DSG принято делить на два вида – «мокрые» и «сухие». Первый вид – «мокрый» – появился первым и характеризуется наличием шести передач. Сцепление в такой DSG находится в масляной ванне, отсюда и название. Спустя время Volkswagen презентовали DSG-7. Это РКПП с «сухим» сцеплением. На практике считается более проблематичным вариантом.
На практике считается более проблематичным вариантом.
Познакомиться подробнее с DSG (нажмите, чтобы прочитать статью)
Интересное видео на тему того, как работает роботизированная коробка ДСГ
Проблемы
Powershift
Роботизированная трансмиссия Powershift является разработкой компании Ford, поэтому и устанавливается на автомобили североамериканского концерна. Это преселективная КПП с двумя сцеплениями. В качестве исполнительных механизмов выступают сервоприводы, которыми управляет электронный блок, закрепленный на корпусе коробки. Если верить многочисленным отзывам, то Powershift более надежна конкурентной DSG. Однако это не делает её лидером рынка, так как получила те же недостатки, что и роботизированная КПП от Volkswagen.
Познакомиться подробнее с PowerShift (нажмите, чтобы прочитать статью)
S-tronic
Компания Audi входит в состав концерна VAG, но это не мешает ей разрабатывать собственные автомобильные трансмиссии. Так инженеры Audi создали преселективную коробку S-tronic, которая сильно напоминает DSG. Но есть некоторые существенные отличия. Сегодня S-tronic ставят преимущественно на автомобили с передним и полным приводом. В ней также два сцепления, что позволяет роботу работать беспрерывно в одном потоке и без потери мощности. Еще есть R-tronic – другая модификация РКПП от компании Audi. Отличается от S-tronic наличием гидропривода. Такая коробка переключает передачи примерно за 0.8 мс, а это серьёзный показатель динамичности.
Познакомиться с S-Tronic (нажмите, чтобы прочитать статью)
DCT M Drivelogic
Впервые роботом DCT M Drivelogic баварские инженеры оснастили BMW M3. Коробка может работать как в полностью автоматическом, так и в ручном режиме. В обоих случаях передачи переключаются с недостижимой механике и автомату скоростью. Водителю не нужно пользоваться селектором коробки передач. Достаточно переключить лепестковый элемент управления под рулем в нужное положение. Особенность DCT M заключается в наличии функции Drivelogic, которая позволяет водителю самостоятельно переключать передачи и переходить от спокойного стиля вождения к динамичному. Всего предусмотрено 11 программ – 5 для автоматического режима и 6 для ручного.
Коробка может работать как в полностью автоматическом, так и в ручном режиме. В обоих случаях передачи переключаются с недостижимой механике и автомату скоростью. Водителю не нужно пользоваться селектором коробки передач. Достаточно переключить лепестковый элемент управления под рулем в нужное положение. Особенность DCT M заключается в наличии функции Drivelogic, которая позволяет водителю самостоятельно переключать передачи и переходить от спокойного стиля вождения к динамичному. Всего предусмотрено 11 программ – 5 для автоматического режима и 6 для ручного.
PDK
Роботизированная КПП от компании Porsche конструктивно является узлов, в корпусе которого помещены две механически коробки. Также конструкцией предусмотрено два сцепления, поэтому PDK относится к сегменту трансмиссий с двойным сцеплением. Функционирует робот за счет гидравлического привода и электронного блока управления. Всего предусмотрено семь передач, последняя с большим передаточным отношением снижает показатель расхода топлива. Пик динамики наблюдается с активной шестой скоростью. Коробка работает в двух режимах – автоматическом и ручном (полуавтоматическом). Сегодня PDK ставят на автомобили с мощными моторами – Porsche Panamera Turbo, Porsche 911 Turbo, Porsche Cayman.
Пик динамики наблюдается с активной шестой скоростью. Коробка работает в двух режимах – автоматическом и ручном (полуавтоматическом). Сегодня PDK ставят на автомобили с мощными моторами – Porsche Panamera Turbo, Porsche 911 Turbo, Porsche Cayman.
Speedshift DCT
7-ступенчатая роботизированная КПП была разработана специально для мощных автомобилей концерна Mercedes Benz и подразделения AMG. Коробка отличается наличием четырех программ и функции старта Rage AMG Speedshift. Вместо привычного гидротрансформатора в Speedshift DCT задействована компактная муфта сцепления, работающая в масляной ванне – так называемое «мокрое» сцепление. От Других модификаций РКПП этот робот отличается небольшим весом – всего 80 кг. Сделать узел легким удалось за счет применение в его изготовлении его картера легкого магниевого сплава.
 youtube.com/embed/jZad7YUo9CE»/>
youtube.com/embed/jZad7YUo9CE»/>
TCT
Компания Alfa Romeo недавно презентовала свою версию роботизированной коробки передач – Twin Clutch Transmission. В первую очередь её поставили на модель Giulietta, где она превосходно сочетается с бензиновым и дизельным мотором (разгон до «сотни» всего за 7.7 и 7.9 сек соответственно). Коробка TCT оснащена гидронасосом электрического типа, который обеспечивает работоспособность привода сцепления и механизма переключения передач. Проектировался узел при помощи специалистов компании LuK, имеющих огромный опыт в разработке и производстве автомобильных сцеплений. Некоторые конструктивные элементы TCT также выполнены из легких материалов, что делает коробку на 10 кг легче, чем классическая механика или вариатор.
Twin Clutch SST
Робот с двойным сцеплением Twin Clutch SST ставят на автомобили Mitsubishi, например, на Lancer Evolution и Outlander XL. Это спортивная коробка, в которой вместо гидротрансформатора исправно служат два механизма сцепления, помещенные в один корпус. Отличается тремя режимами работы, которые позволяют адаптироваться автомобилю под разные условия эксплуатации. Для городской езды подходит режим Normal Mode: переключение передач происходит плавнее и мягче, расход топлива минимальный. В режиме Sport Mode переход на высшие скорости происходит на высоких оборотах, что несколько увеличивает расход. Третий режим Super Sport Mode переключает скорости на максимально высоких оборотах. Его целесообразно использовать, когда требуется полностью реализовать динамический потенциал автомобиля.
Отличается тремя режимами работы, которые позволяют адаптироваться автомобилю под разные условия эксплуатации. Для городской езды подходит режим Normal Mode: переключение передач происходит плавнее и мягче, расход топлива минимальный. В режиме Sport Mode переход на высшие скорости происходит на высоких оборотах, что несколько увеличивает расход. Третий режим Super Sport Mode переключает скорости на максимально высоких оборотах. Его целесообразно использовать, когда требуется полностью реализовать динамический потенциал автомобиля.
Плюсы и минусы робота
Сегодня можно найти довольно большое число автовладельцев, положительно отзывающихся о роботизированной коробке. Особенно нравится автоматизированная трансмиссия начинающим водителям. Это и понятно, ведь для управления автомобилем достаточно нажимать педаль тормоза и газа, а электронная система самостоятельно включит нужную передачу. Отсюда вытекают главные преимущества КПП:
- высокий комфорт;
- удобство;
- простота использования;
- высокая скорость переключения передач;
- экономия топлива в городском цикле;
- конструктивная схожесть с механикой, что придает агрегату дополнительную надежность, если сравнивать с тем же вариатором;
- возможность переключения ступеней в ручном режиме.
Как показывает практика, расход бензина автомобилем коробкой-роботом при одинаковых условиях в городском цикле на 20% меньше, чем у транспортного средства с привычным автоматом. Однако такое устройство далеко неидеальное. Также в процессе эксплуатации авто можно ощутить некоторые недостатки узла:
- высокая стоимость обслуживания и ремонта;
- непродолжительные задержки в переключении передач;
- дешевые модели не позволяют провести адаптацию под конкретный стиль вождения.
Специалисты прогнозируют, что по мере увеличения автомобилей с роботом, развитием технологий ремонта и обслуживания этой коробки со временем станет более доступным и дешевым ремонт агрегата. Тот самый электронно-гидравлический блок, или просто «мехатроник», является самой дорогостоящей деталью в DSG. Еще несколько лет назад в случае его даже не самой критичной поломки дилеры, не думая, ставили вердикт – замена устройства. Сейчас хватает специализированных сервисов, выполняющих простые и сложные ремонты «мехатроника».
Основные отличия от автоматической коробки
Автоматическая коробка не утратила актуальности ни с появлением вариатора, ни с появлением роботизированной трансмиссии. Это по-прежнему довольно надежный, а главное хорошо изученный агрегат. Сходство в том, что и автомат, и робот обеспечивают плавный переход с одной передачи на другую. На этом всё. Гораздо больше отличий. Главная разница между этими двумя коробками заключается в следующем:
- В АКПП не предусмотрено жесткое сцепление с двигателем;
- Робот ощутимей снижает нагрузку на мотор за счет максимально коротких переключений передач;
- С автоматической КПП автомобиль уступает в плане динамики;
- Новые РКПП еще недостаточно хорошо изучены, окончательно неизвестен ресурс этих агрегатов, чего нельзя сказать об АКПП.
Возможно, автомат даже накладней обслуживать, а вот что касается ремонта, то здесь и говорить нечего. Автоматическую коробку перебирают на каждом шагу, хватает и грамотных специалистов, способных в кратчайшие сроки восстановить агрегат после серьёзной поломки. В случае с РКПП ситуация ровно обратная.
Автоматическую коробку перебирают на каждом шагу, хватает и грамотных специалистов, способных в кратчайшие сроки восстановить агрегат после серьёзной поломки. В случае с РКПП ситуация ровно обратная.
Заключение
Мы выяснили, что такое коробка робот. Очевидно, что будущее за конструктивно и функционально совершенными автомобильными системами. Но процесс окончательного усовершенствования робота еще не начался. Перед покупкой автомобиля нужно четко уяснить для себя, каким требованиям он должен отвечать. Сказать точно, что лучше – робот или автомат – крайне сложно. И, наверное, никто не возьмется за это. Поэтому каждый автомобилист должен на основании всех плюсов и минусов определить для себя, какой тип трансмиссии удовлетворит все запросы и потребности.
Робот? Вариатор? Гидромеханика? — какая АКП подойдет вам — журнал За рулем
Разница между автоматом и «ручкой» — принципиальная. Но АКП разных типов тоже серьезно отличаются друг от друга. Об этом многие не задумываются, и напрасно: есть технические и эксплуатационные особенности, о которых стоит знать заранее.
Гидромеханика
Гидромеханический автомат — самый распространенный тип автоматических коробок, который встречается практически у всех автопроизводителей. В силу конструктивных особенностей эти автоматы лучше других переваривают большой крутящий момент, поэтому именно их чаще всего устанавливают на тяжелые кроссоверы и внедорожники, а также на полноразмерные седаны. По сути это планетарная коробка передач, соединяемая с мотором через гидротрансформатор. Переключение планетарных рядов в ранних моделях происходило гидромеханически, а теперь — по командам электроники.
Материалы по теме
На бюджетные модели устанавливают простенькие «четырехступки», хотя их осталось уже мало. Например, популярная коробка DP0/DP2 работает на многих недорогих моделях Peugeot-Citroen и Renault. Характеристика у этой коробки не лучшая, как, впрочем, и надежность: выхаживает она, как правило, не более 120 000 км. Гораздо лучше по надежности (около 200 000 км), да и по алгоритму переключения японские четырехступки Jatco. Их устанавливают на Гранты и Датсуны.
Материалы по теме
Постоянно ужесточающиеся нормы выбросов заставляют производителей увеличивать число передач в автоматах. Но выигрывает от этого не только природа, но и владельцы автомобилей: многоступенчатые коробки позволяют оптимальнее реализовать возможности двигателя и таким образом снизить расход топлива. Даже на относительно недорогих автомобилях, например, Кia Rio или Hyundai Solaris, нынче применяют шестиступенчатые автоматы. Столько же передач и у коробки 09G Tiptronic, устанавливаемой на модели Volkswagen Polo и Skoda Rapid. Средний ресурс при бережной эксплуатации и своевременной замене рабочей жидкости (не реже чем каждые 60–80 тысяч км) составляет 250 000 км.
На более мощных и тяжелых автомобилях количество ступеней в автоматах может доходить до десяти (например, у купе Chevrolet Camaro ZL1 и пикапа Ford F‑150). Но «многоступенчатость» сказывается на надежности. Ведь чем больше передач, тем чаще коробка переключается, а значит больше изнашиваются фрикционы. Кроме того, жесткие ограничения по габаритам приводят к тому, что каждая ступень становится миниатюрнее (без основательного запаса надежности).
Кроме того, жесткие ограничения по габаритам приводят к тому, что каждая ступень становится миниатюрнее (без основательного запаса надежности).
Универсальное (и лучшее) решение для города и бездорожья — гидромеханика
Вариаторы
Вариатор — казалось бы, идеальный агрегат для передачи крутящего момента от мотора к колесам. Нет никаких ступеней: передаточное число изменяется плавно. На ведущем и ведомом валах вместо шестерен установлены конусообразные элементы. Смещая их относительно друг друга, можно плавно изменять передаточное число. Момент передает пластинчатый ремень или штифтовой (еще его называют цепью).
Материалы по теме
как правильно пользоваться роботизированной КПП, ее плюсы и минусы с фото и видео
Современные автомобили оборудуются новыми типами трансмиссий, среди которых роботизированная КПП. Чтобы разобраться в основных моментах, связанных с ее эксплуатацией, нужно понимать, что такое коробка передач робот.

Содержание
[ Раскрыть]
[ Скрыть]
Что собой представляет роботизированная коробка передач?
Роботизированная коробка на автомобиле означает нечто среднее между МКПП и автоматической трансмиссией. Фактически роботизированная КПП представляет собой «механику», оборудованную автоматическим сцеплением и возможностью переключения скоростей. Работа этого типа агрегата зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только правильно передавать входящие данные для обеспечения правильной работы КПП.
Перед покупкой авто с таким агрегатом рекомендуется разобраться с основными характеристиками и принципом действия устройства.
Устройство роботизированной КПП
Схематическое устройство конструктивных компонентов РКППЧтобы понять, что такое коробка передач робот, надо разобраться в устройстве агрегата. Дополнительные элементы, предназначенные для выжима сцепления, а также переключения и выбора скоростей, называются актуаторами.
Роботизированная трансмиссия оснащается собственной управляющей системой, выполненной в виде блока управления, а также нескольких контроллеров. Эти датчики предназначены для взаимодействия с блоком. Роботизированная КПП принципиально отличается от традиционной автоматической коробки и вариаторных трансмиссий.
Коробки передач робот, как и механические, оснащаются сцеплением. В таких типах агрегатов не применяются трансмиссионные масла ATF.
В зависимости от производителя автомобиля, роботизированная трансмиссия может оснащаться одним либо двумя сцеплениями:
- если сцепление одно, то это однодисковый агрегат;
- если два, то трансмиссия считается преселективной.
Основные компоненты устройства роботизированного агрегата:
- Сама КПП.
- Актуаторы или сервоприводы. Предназначены для выжима сцепления и активации скоростей.
- Управляющий модуль, являющийся микропроцессорным блоком. Используется для обработки и передачи команд.
- Внешние контроллеры. Количество датчиков может отличаться в зависимости от производителя машины.

КПП
Подробнее с устройством роботизированного агрегата рекомендуем разобраться на примере шестиступенчатой коробки, оснащенной двумя сцеплениями. Агрегат выполнен в виде механической КПП, но оборудуется двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив обладает внутренней полостью, в которую устанавливается внутренний компонент. На внешнем шкиве располагаются шестеренки привода второй, четвертой и шестой скоростей, а на внутреннем — шестерни первой, третьей, пятой и задней передачи.
Каждый вал роботизированной коробки передач оборудуется отдельным сцеплением.
Актуаторы или сервоприводы
Актуаторные устройства могут быть электрическими либо гидравлическими. Электрический тип элементов выполнен в виде электрического моторчика с редукторным устройством, а гидравлический считается гидроцилиндром. Шток последнего связывается с синхронизаторным устройством. Основное предназначение актуаторных элементов заключается в механическом перемещении синхронизаторных составляющих, а также активации и деактивации сцепления.
Управляющий модуль
Управляющий модуль — микропроцессорный блок, на который установлены внешние контроллеры. Эти датчики задействованы в электронной системе управления мотором машины. Датчик трансмиссии взаимодействует с контроллерами от силового агрегата и прочих систем, к примеру, ABS. Управляющий модуль может быть совмещен с микропроцессорным блоком управления ДВС, но трансмиссия будет функционировать по своему алгоритму.
Канал Carvizor подробно рассказал об устройстве и конструктивных особенностях РКПП.
Особенности роботизированной КПП
Электрический привод сцепления функционирует за счет электромотора, а также механической скорости. Работа гидравлического привода основана на специальных цилиндрических устройствах, управление которыми осуществляется посредством электромагнитного клапана. Иногда роботизированный агрегат может быть дополнен электромотором, использующимся для перемещения цилиндрических элементов и рассчитанного на поддержку функционирования гидромеханического модуля. Это устройство, оснащенное приводом, характеризуется долгим переключением скорости, которая может составить до половины секунды.
Если сравнить с гидравлическим устройством, то для работы агрегата не требуется постоянная поддержка нужного уровня давления. В некоторых моделях Опель гидравлические агрегаты характеризуются быстрым циклом переключения скорости, обеспечивающего переключение за 0,06 сек. Но такие роботы обычно устанавливаются на спорткары.
Принцип работы коробки передач робот
Схема функционирования роботизированного агрегатаРоботизированный агрегат работает наподобие механики — для начала езды и переключения скоростей водителю надо выжимать педаль сцепление. Процедура активации этого механизма выполняется посредством актуаторного устройства, получающего импульс от управляющего модуля. После подачи сигнала узел медленно вращает редукторный узел.
Если трансмиссия оборудована двумя сцеплениями, то изначально производится активация первого. После этого актуаторное устройство выбора и активации скорости подводит синхронизаторный узел к шестеренке первой скорости. Это приводит к ее блокировке на валу и началу вращения вторичного шкива. Когда машина тронулась с места, водитель жмет на газ. Если трансмиссия однодисковая, активация следующей скорости произойдет через определенный временной промежуток. В итоге появляется так называемый провал во времени.
Для предотвращения появления временной задержки и снижения время переключения передач агрегат оборудуется вторым сцеплением и другим валом. Это привело к созданию преселективной коробки. Во время включения первой скорости вторая готова к активации, поскольку второе сцепление уже задействовано. Когда на агрегат поступает сигнал от управляющего модуля, происходит быстрое переключение с первой скорости на вторую.
Аналогично выполняется последующее переключение на более высокие и низкие скорости во время движения. Временной интервал при переключении минимальный. Любые перегазовки исключаются, также нет провала тяги двигателя и других нюансов. В результате автомобиль едет динамично, а экономия потребления горючего максимальная. Функционирование в режиме автомата достигается благодаря регулярному анализу микропроцессорного модуля импульсов, подающихся с внешних контроллеров.
При получении сигналов и их отправке микропроцессор учитывает:
- величину нагрузки на силовой агрегат;
- скорость езды;
- положение, в котором находится педаль газа.
Роботизированные коробки обладают возможностью ручного переключения скоростей, эту особенность можно назвать имитацией гидромеханического автомата. Некоторые типы агрегатов позволяют выполнить блокировку при активации повышенной скорости.
Блок-схема функционирования роботизированной системы I-Shift на автомобилях ХондаРежимы работы
Микропроцессорный модуль может функционировать в нескольких режимах:
- Спорт. Обычно его активация производится при движении на трассе, когда автомобиль стабильно едет на повышенной скорости.
- Городской режим. Активируется при движении по городу либо стоянии в пробке.
- Эконом. Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
Как научится ездить на роботизированной коробке передач? Основные особенности управления
Чтобы не допустить появления неисправностей в работе трансмиссии, надо знать, как пользоваться роботом, а именно:
- как выполнять прогрев агрегата;
- как правильно начинать движения;
- как пользоваться трансмиссией при эксплуатации авто в режиме города.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многие производители авто утверждают, что роботизированные агрегаты не нуждаются в прогреве. Но в этом вопросе надо учитывать температуру рабочей жидкости в смазочной системе, а также как масло ведет себя в условиях мороза. Некоторые типы расходных материалов при низких температурах загустевают и собираются в нижней части агрегата. По стандарту процесс прогрева состоит в запуске двигателя и выжидании 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.
Если автомобиль находится в гараже, то выгонять его нужно спокойно и плавно, чтобы не допустить толчков и рывков. При прогреве надо следить за количеством оборотов, их число в идеале будет минимальным и составит около 1 тысячи в минуту. Выполнять прогрев агрегата следует и летом, благодаря этому все составляющие компоненты робота будут качественно смазаны. Выполнение прогрева позволит не допустить быстрого износа и стирания компонентов агрегата.
Основные особенности эксплуатации, которые позволят увеличить ресурс работы агрегата в целом:
- Нельзя допустить буксования при езде в мороз. Это приведет к быстрому износу исполнительных механизмов и узлов. Регулярное буксование станет причиной разкалибровки агрегата.
- Специалисты не советуют часто ездить по сильно заснеженным поверхностям. Транспортное средство может застрять, что в итоге станет причиной пробуксовок.
- В качестве зимней резины рекомендуется использовать изделия, оснащенные шипами. При установке на колеса обычных шин есть вероятность пробуксови на гололеде.
- При длительных простоях, составляющих несколько дней и более, селектор коробки передач рекомендуется устанавливать в положение Е. Мотор должен быть заглушен.
- Если состояние дороги плаченое, специалисты советуют начинать движение со второй скорости, но при этом сильно не газовать.
Об основных принципах управления роботизированной КПП на примере Лады Гранты рассказал Алексей Рыков.
Правила правильного старта на коробке робот
Владельцам машин, оборудованных роботизированными КПП, надо учитывать, что некоторые транспортные средства не имеют дополнительной опции помощи при старте. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться с места. Процедура троганья выполняется так же, как на машине с механическим агрегатом.
Более подробно о начале езды:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг коробки передач устанавливается в режим А.
- Водитель легко, без усилий жмет на газ.
- Одновременно с этим отключается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и высокая влажность, селектор коробки можно перевести в положение М1. Сила воздействия на педаль газа должна быть допустимой, чтобы не произошла перебуксовка. Если машина оборудована гироскопом, то при выборе автоматического режима микропроцессор агрегата сам выберет необходимую скорость и будет выполнять переключение. Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Если изначально устанавливается скоростной режим, то скорость передвижения не рекомендуется менять. Количество оборотов двигателя должно составить от 2500 до 5000 в минуту, но не за пределами этого диапазона. При начале езды на спуске селектор трансмиссии устанавливается в режим А и отключается рычаг ручного тормоза.
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в режиме города и пробок может привести к быстрому износу компонентов трансмиссии. Для предотвращения этого при остановке машины следует переводить рычаг коробки передач в режим N. Затем производится активация стояночного тормоза и остановка мотора. Если остановки кратковременные, к примеру, в условиях пробок, то режим нейтрали можно не включать, достаточно остановиться, когда рычаг установлен в режим А. Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
О тонкостях использования машин с установленным роботом рассказал Василий Костин.
Преимущества
Плюсы роботизированных агрегатов:
- Надежность конструкции агрегата в целом. В основе устройства лежит механическая составляющая, которая прошла многочисленные испытания и изучена специалистами. Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
- Эксплуатация автомобиля с установленным роботизированным агрегатом позволяет сэкономить горючее. Если коробка и двигатель машины не изношены, то экономия горючего может быть до 30%.
- Для заправки в роботизированный агрегат требуется меньше смазочной жидкости, в среднем это не более трех литров. Для сравнения — в вариаторные коробки заливается около семи литров. Такое преимущество позволяет сэкономить финансовые средства.
- Количество передач в роботах соответствует числу скоростей на механике.
- Благодаря тому, что основу КПП составляет механическая часть, это позволяет выполнить простой ремонт. Навыками подобного ремонта владеют многие специалисты, чего не скажешь о вариаторных агрегатах. Большинство распространенных неисправностей можно решить самостоятельно при правильном подходе.
- Срок службы системы сцепления больше, чем на механических КПП, примерно на 40%. Речь идет не только об экономии финансовых средств, но и о безопасности.
- При эксплуатации авто в городских условиях начать движение без нагрузки на агрегат позволяет функция переключения скоростей в ручном режиме.
Недостатки
Роботизированные КПП имеют не только плюсы, но и минусы, они приведены в соответствии с отзывами владельцем машин с РКПП:
- Основной минус в РКПП заключается в проблемах при программировании трансмиссии. Автовладельцу может быть затруднительно перепрограммировать программное обеспечение, чтобы повысить динамику машины и сэкономить ресурсы агрегата. Поэтому возникают сложности с настройкой трансмиссии под определенный стиль езды. Водителю потребуется время, чтобы привыкнуть к манере функционирования авто для удобной эксплуатации.
- Низкая скорость активации скоростей и замедленная реакция агрегата. Это обусловлено издержками в программировании устройства. Данная проблема характерна и для многих автоматических КПП.
- При езде в условиях города и пробок, а также по неровным дорогам водителю следует переходить на ручной режим управления. В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.
- Во время переключения скоростей ощущаются рывки и толчки. Не на всех агрегатах, но на многих. Это связано с тем, что газ не сбрасывается перед тем, как произойдет переключение скорости. Для ликвидации данной проблемы можно не выжимать полностью педаль газа.
- При движении в гору может разомкнуться сцепление. Проблема связана с перегревом трансмиссионного агрегата. Если автомобиль движется на подъем, рекомендуется переходить на ручное управление.
Решить проблему с перепрограммированием можно путем замены прошивки микропроцессора, но это надо делать, когда закончится срок гарантийного обслуживания.
Каналом HPC представлен реальный негативный отзыв потребителя о работе роботизированного узла на авто.
Отличие роботизированной коробки передач от автоматической
Основные отличия роботизированных трансмиссий от автоматических агрегатов:
- Конструктивные особенности. Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.
- Автоматические трансмиссии выигрывают у роботизированных агрегатов в плане быстроты переключения скоростей. Также на автоматах процедура переключения выполняется более плавно.
- Роботизированные устройства обладают опцией ручного переключения. На автоматических агрегатах возможности ручного управления нет.
- Автомобили, оборудованные роботизированным агрегатом, потребляют меньше горючего. Для их заправки требуется меньше смазочной жидкости.
- Процедура ремонта и обслуживания коробок передач робот обойдется потребителю дешевле, нежели АКПП.
Актуальность коробки робот в России
Российские производители автомобилей почти не устанавливают роботизированные агрегаты на свои продукты. В 2015 году руководство автоконцерна ВАЗ заявило, что модели машин Лада Приора будут оснащаться роботизированными КПП. Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован под отечественные дороги, а также погодные условия, характерные для климата России.
К примеру, автоматы могут отказать в запуске мотора авто, если температура упадет ниже -25 градусов. Роботизированные агрегаты смогут эффективно функционировать и заводить ДВС при -40 градусах. Производитель АвтоВАЗ дает гарантию на три года на КПП, но утверждает, что в среднем срок службы устройства составит около десяти лет. Такой шаг был сделан представительством концерна для увеличения продаж автомобилей Лада Приора.
Сегодня из отечественных автомобилей роботизированные КПП устанавливаются только на Лады Гранты и Приоры.
Официальный канал Лада представил сюжетный ролик о производстве роботизированных агрегатов для автомобилей Лада Гранта.
Советы по выбору роботизированной коробки передач
Перед покупкой транспортного средства с РКПП надо собрать максимум информации о функционировании конкретного типа трансмиссии. Рекомендуется изучить отзывы потребителей, поскольку отдельные варианты роботов обладают «глюками», характерными для всей линейки. В частности, надо узнать о временном интервале при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
Выбирая авто, надо учесть и параметр индивидуальности устройства. Одинаковые трансмиссии могут различаться между собой. Проблемы, связанные с работой агрегата, часто можно удалить посредством перепрошивки микропроцессорного блока.
Основные неисправности в работе роботов
Симптомы, которые могут сообщить о неполадках в работе устройства:
- На контрольном щитке появился сигнализационный индикатор. Это может быть лампочка Чек Энджин или специальный символ, сообщающий о проблемах в работе коробки передач.
- При езде водитель слышит посторонние звуки. О неполадках в работе трансмиссии могут сообщить нехарактерный вой или жужжание.
- Отсутствует реакция при нажатии на газ. Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.
- Появление масляной лужи под автомобилем. Это свидетельствует об утечке расходной жидкости из агрегата.
- Происходит буксовка системы сцепления.
- Когда водитель жмет на газ и делает это плавно либо при переключении скоростей, появляется толчок или рывок.
- Трансмиссионный узел сам по себе прекращает функционировать, автомобиль останавливается и не двигается.
Большая часть неполадок обусловлена некорректной работой микропроцессорного устройства. Если говорить о механических проблемах, то большая часть из них связана с износом составляющих элементов. Такие детали обычно ремонту не подлежат и меняются.
Механические неполадки:
- износ вилки, предназначенной для выбора скорости;
- подшипниковые устройства качения изнашиваются, из-за этого может наблюдаться гул.
Фотогалерея
Фото роботов от разных автопроизводителей приведены в этом разделе.
Видео «Как не допустить быстрого выхода из строя роботизированной КПП»
Пользователь JoRick Revazov рассказал о вещах, которые нельзя делать с роботизированным узлом на автомобиле.
Загрузка …Коробка робот — что это такое и чем отличается от коробки автомат
С момента появления набравшая популярность АКПП ставила перед автопроизводителями вопросы пользователей, связанные с дороговизной в производстве и ремонте, большим расходом и слабой динамикой.
Многие вопросы были решены с появлением нового класса автоматизированных коробок – роботизированной, или «коробки-робота».
Всего, к сведению, на рынке представлены четыре типа коробки переключения передач: ручная (механика), автоматическая, робот и вариатор. Изучим преимущества и недостатки роботизированной коробки передач.
Коробка робот — что это такое
В сущности, коробка-робот – это способ отказаться от АКПП, не возвращаясь полностью к механике.
Производители описывают РКПП как механическую коробку с электронным управлением.
Это выражается в том, что в салоне с такой коробкой не будет педали сцепления, а рычаг сменится на «джойстик» – водитель будет не переключать сам передачи, а указывать, на какую переключиться.
Робот принимает от водителя информацию о переключении в электронном виде (кодируется рычагом) и запускает алгоритм смены ступени.
Фактически робот вместо человека выжимает сцепление и меняет шестерни, но делает это, как на классике.
Управляются манипуляции с валами и шестернями электронным блоком управления (ЭБУ).
По этим причинам ездовые характеристики роботизированной коробки скорее схожи с механикой, чем с АКПП или вариатором.
В первых коробках-роботах, как и в механике, требуется сбавлять обороты при переключении, в более новых – нет, об этом чуть ниже.
Как работает коробка робот
Роботизированная коробка передач настолько много взяла от ручной, что для ответа на вопрос, как же она работает, стоит вспомнить, как устроена самая классическая механика.
Её основу составляют пара (ведущий и ведомый) валов. Первый вращается в паре с двигателем, второй отправляет момент вращения на колёса.
Валы соединены шестернями, причём на ведомом, связанном с колёсами, шестерни не зафиксированы жёстко, а в нейтральном положении свободно прокручиваются, не передавая вращения.
Также со вторичным валом связаны специальные устройства – синхронизаторы, которые связаны с рычагом переключения и при соответствующем усилии от водителя фиксируют на валу одну из шестерёнок, соответствующую выбранной передаче.
Отпустив сцепление, водитель запускает передачу момента кручения на колёса в нужном режиме.
Те же принципы унаследовала от механики роботизированная коробка передач. Главное отличие на «низовом» уровне – появились в ней так называемые актуаторы, или сервоприводы.
Это либо электрический, либо гидравлический прибор с исполнительным механизмом, который занимается смыканием-размыканием сцепления валов.
Дальше различий больше. Такие коробки снабжены двумя режимами работы: ручным и автоматическим.
В ручном между водителем и актуатором появляется одна прослойка – электронный блок управления, ЭБУ, запрограммированный на определённый алгоритм переключения передач.
Он снимает показания с рычага-джойстика (селектора) и запускает сервоприводы: первый фактически «жмёт сцепление», второй – орудует синхронизаторами, как сделал бы это человек. Педаль сцепления, таким образом, теряет свою актуальность и её в машине нет.
На режиме автомата поверх ЭБУ включается компьютер. В такой работе РКПП становится похожа на АКПП, ведь решения о переключении скоростей принимает сама машина, анализируя скорость движения и данные целого ряда датчиков.
Независимо от того, электрического или гидравлического типа коробка, робот не способен так чутко ощущать «отдачу» сцепления и вынужден перестраховываться, надолго прекращая передачу мощности внутри коробки.
Это вызывает рывки и неудобные «провалы» при разгоне, что являлось ключевым минусом такой коробки.
Первыми решениями этой проблемы стало сокращение времени провалов – для этого коробку совершенствовали в программной части, что увеличивало стоимость, но мало помогало с проблемой.
Новым решением стало появление двойного сцепления в коробке DCT (расшифровывается dual clutch transmission), в которой вторичных вала два, вложенные один в другой.
Шестерни на валах разбиты через одну: на первом нечётные скорости, на втором – чётные. Это позволяет при разгоне заготовить следующую передачу сразу, когда включается предыдущая: например, при старте с первой вторая на втором валу уже готова к подключению.
Когда переключение произошло, первый вал уже готовит третью скорость – и так далее, «разрывы» компенсируются и переключение происходит плавно, без рывков.
Кроме того, такая коробка компактнее и подходит даже для малолитражек и, что примечательно – быстрее и экономичнее даже механики, не говоря об автомате и более старых версиях робота.
Но конструктивно она всё-таки сложнее, а потому дороже.
Коробка робот и автомат: в чем разница
Для водителя в режиме обычной городской и междугородней езды, без экстренных ситуаций, различий между автоматом и роботом мало.
Там и там, например, отсутствует педаль сцепления, пусть и по разным причинам: в АКПП сцепления нет вообще, в РКПП оно есть, но в человеке не нуждается.
Робот механический, а автомат – гидромеханический, и это ключевое различие.
Для автомата жидкость в гидромеханической коробке является своеобразным предохранителем, но она же снижает эффективность передачи крутящего момента: у него низкий КПД, то есть часть мощности пропадает – этим обусловлен повышенный расход топлива.
Внешне робота и автомат можно легко отличить по селектору (где рычаг). На автомате есть положения N и R, а на роботе к ним добавляется ещё знак P.
Коробка робот: плюсы и минусы
Ключевые плюсы «робота» выгодно отличают его и от механики, и от «автомата», и от вариатора. Перечислим ключевые из них.
Плюсы:
- Надёжная конструкция.
Поскольку «робот» – прямой наследник механики, его конструкция давно известна, изучена и претерпела длительную эволюцию, чего нет у автомата и вариатора. Надёжность его, соответственно, превосходит эти два типа трансмиссии. - Ниже расход.
Считается, что в плане горючего можно сэкономить до 30% бензина при использовании РКПП вместо АКПП или вариатора.
Его расход сопоставим с «механикой», а при двойном сцеплении – даже ниже.
Кроме того, снижен расход масла: хватает 2-3 литров вместо тех 7, в которых нуждается вариатор. - Число передач.
Оно равно аналогичному на механической коробке. - Дешёвый ремонт.
Этот плюс также совпадает с плюсом «механики»: она проще, а потому дешевле поддаётся реконструкции, автоумельцы могут сделать часть операций даже своими руками, как и в классической сборке. - Повышенный ресурс.
Благодаря особенностям конструкции, выше ресурс как двигателя, так и сцепления. - Удобен на подъёмах и в пробках.
Это уже плюсы «автомата», которые дублируются в РКПП – человеку не нужно проводить сложных манипуляций с постоянным переключением, можно не бояться откатиться назад при старте с подъёма. - Более низкая цена «старых» видов робота.
Однако они имеют больше недостатков. Цена робота с двоёной трансмиссией, напротив, выше.
Однако есть и ряд недостатков, и они порой существенны.
Минусы:
- Высокая цена современных модификаций.
Чтобы избежать многих минусов ниже, нужно купить машину с DCT, а это уже другой класс цены. - Невозможность «прошивки».
Производитель решает за водителя, какой будет алгоритм переключения передач, и любители всё контролировать могут быть им недовольны.
К тому же на разных моделях алгоритмы разные, а определиться, какой оптимален, не так-то просто. - Ниже скорость работы.
Этого недостатка нет в дорогих DCT, но в бюджетных вариантах, как говорилось ниже, присутствуют неприятные задержки при повышении скорости. - При откате с горки всё-таки может разомкнуться сцепление, что невозможно представить на «автомате».
Читайте также:
Роботизированная коробка передач
Роботизированная коробка передач, своего рода, полуавтоматическая. Он сочетает в себе черты автоматической и механической коробки. С «механикой» он сочетает в себе постоянное переключение по желанию водителя. В отличие от автомобиля, у которого есть механическая коробка и вместе с ней педаль сцепления, которую необходимо выжимать при переключении скоростей, у автомобилей с полуавтоматическим вариантом педаль сцепления отсутствует. Вместо этого для оборудования автомобиля требуется целая система датчиков, исполнительные механизмы и передатчики, которые переключают коробку передач на собственном бортовом компьютере.Благодаря компьютеру работа всех элементов синхронизирована, а некоторые электронные системы, оснащенные роботизированной коробкой передач, также способны научиться распознавать стиль вождения каждого водителя, то есть могут предугадывать его действия.
Машины для массового производства снабжены ручкой переключения скоростей, которая расположена там же, где и ручка механической коробки. Отличие заключается в схеме перемещения рычага — традиционная Г-образная форма заменяется перемещением только вперед и назад.У автомобилей, участвующих в Формуле 1, ручки отсутствуют, их заменяют две педали, которые переключают скорость: одна — увеличивает, другая — снижает.
Роботизированная коробка передач работает по следующей схеме. При переключении ручки переключения передач и нажатии на педаль акселератора информация о доступной скорости и новый запрос на изменение скорости поступают через датчики через датчики. Полученная информация синхронизируется в блоке давления, выбирается оптимальная частота вращения, обеспечивается согласованная работа всех механизмов коробки передач.Здесь учитываются показатели контрольных приборов, скорость вращения двигателя кондиционера.
Управление гидромеханическим узлом, отвечающим за включение и выключение сцепления, осуществляется через центральный узел давления. Это синхронный процесс со всеми действиями водителя. Роботизированная коробка передач очень удобна: электроника реагирует в разы быстрее человека. Для нейтрального положения трансмиссии при парковке и движении задним ходом предварительно нажмите две педали одновременно, затем выберите желаемое положение.
Сцепное устройство используется только для приведения автомобиля в движение. Коробка передач робота для быстрого переключения скоростей не требует перемещения ручки, необходимо отпустить педаль газа, двигатель снизит скорость до необходимой для перехода на следующий скоростной режим. Убедитесь, что ручка находится в желаемом положении.
Коробка передач робота устанавливается не только на легковые автомобили, но и на грузовики и даже автобусы. Японские производители установили такой элемент на один из спортбайков Yamaha.У каждого производителя автомобилей такой вариант можно назвать по-своему. Не забывайте, что он требует бережного и деликатного отношения к себе.
Роботизированная механическая трансмиссия обеспечивает водителю гораздо больше удобства и комфорта, у него больше возможностей сосредоточить свое внимание непосредственно на дороге. Имеет некоторое отличие от так называемых «автоматических» коробок передач. В его основе та же «механика», но с дополнительными сервоприводами. Их задача — автоматически выжимать сцепление и переключать ступени передач.Например, в автомобиле Opel роботизированная механическая коробка передач имеет функцию Start-N с автоматическим переключением нейтрали. Когда педаль тормоза нажата, автомобиль заводится.
Эта коробка намного дешевле полностью автоматизированной, хотя, в то же время сочетает в себе достоинства «автомата» и динамические характеристики механической версии, а также обеспечивает меньший расход топлива.
p >>Frontiers | Компактные редукторы для современной робототехники: обзор
Введение
Промышленные роботы составляют основу нескольких крупных традиционных производств, включая автомобилестроение и электронику.Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряя роботов на малых и средних предприятиях (МСП) и в вспомогательных службах, обычно в здравоохранении (SPARC, 2015).
Для крупномасштабных промышленных сред с высокой степенью автоматизации преимущество роботизированных решений по сравнению с людьми-операторами в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные грузы с исключительной точностью позиционирования и высокой скоростью.Эти аспекты имеют решающее значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применения в производстве и персональном обслуживании МСП бросают вызов этой традиционной парадигме робототехники. Ключ к успеху в этих новых приложениях лежит в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей.Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на срабатывание роботов. Опыт, накопленный за последние десятилетия, в основном в области робототехники в здравоохранении, показывает, что для безопасного и эффективного взаимодействия с людьми роботы должны в основном двигаться, как люди, а значит жертвовать некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости.Эта ситуация привела к обширным исследованиям в последние годы, охватывающим оптимальный выбор первичных двигателей и передач для срабатывания HRI (Zinn et al., 2004; Ham et al., 2009; Iqbal et al., 2011; Veale and Xie, 2016 ; Verstraten et al., 2016; Groothuis et al., 2018; Saerens et al., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию соединения между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных разработок в этой области дает полезные сведения, позволяющие понять влияние редуктора на общую производительность системы.Паш и Серинг (1983) определили важность инерции при срабатывании и предложили использовать передаточное число для согласования инерции двигателя и отраженной нагрузки в качестве средства минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применили эту идею к области робототехники и определили результирующую способность к ускорению конечного эффектора как определяющий параметр. Ван де Стрете и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предоставили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов.Roos et al. (2006) изучали выбор оптимального привода для трансмиссий электромобилей, добавляя вклад КПД коробки передач. Giberti et al. (2010) подтверждают, что инерция ротора, передаточное отношение, КПД коробки передач и инерция коробки передач являются наиболее важными параметрами для выбора срабатывания, и предлагают графический метод оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009) снова сосредоточились на промышленных роботах и представили метод, моделирующий коробку передач с упором на массу, инерцию и трение.Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют влияние трения на планетарный редуктор, в котором кулоновское трение является доминирующим механизмом трения, и демонстрируют, как КПД редуктора обычно становится преобладающим над КПД двигателя при высоких передаточных числах.
По сравнению с исходными моделями коробок передач, использовавшихся в этих работах, где коробки передач моделировались как идеальные передаточные числа, сложность моделей постепенно возрастала.Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, не учитываются такие важные эффекты, как жесткость на кручение и потерянное движение, в то время как модели инерции коробки передач и эффективности сильно упрощены. Это оправданный подход для множества приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Следовательно, необходим другой подход для предоставления полезных рекомендаций по выбору коробки передач в HRI, позволяющий избежать чрезмерной сложности задач оптимизации в этой области. Предоставление подробных сведений об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора — еще один вариант, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др.(2016), а также Фам и Ан (2018) предоставляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не анализируются достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора состоит в том, чтобы дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо возможности прогнозирования будущего технологий редукторов в робототехнике, этот подход может помочь неспециалистам в области редукторов определить подходящие технологии компактных редукторов для многофакторных требований новых робототехнических приложений (López-García et al., 2018). Для специалистов по коробкам передач из других областей этот анализ может помочь им получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить систему оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробок передач для этой области. Эта структура включает сильную перспективу pHRI и новый параметр — Latent Power Ratio — для оценки эффективности, присущей определенной топологии редуктора.Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий передачи, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение результатов этого обзора вместе с нашими выводами и рекомендациями.
Система оценки роботизированных трансмиссий с расширенными возможностями HRI
Контроль
Управление роботизированными устройствами — очень широкая и сложная тема, которая является предметом обширной исследовательской литературы.В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния коробки передач на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные робототехнические устройства превосходны в достижении высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 1991). Внедрение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: вносит дополнительную нелинейность и сильно влияет на отраженную инерцию.
Нелинейности, вызванные включением трансмиссии, в основном принимают форму люфта и / или трения и уменьшают полосу пропускания системы, создавая важные проблемы управления (Schempf, 1990). Заявление о зубчатых колесах приводит к люфту, трению и (нежелательному) соответствию, которые затрудняют точное управление. (Hunter et al., 1991) сегодня так же актуально, как и почти 30 лет назад. Для некоторых технологий большие кинематические погрешности передачи и особенно нелинейное трение также могут вызывать значительные нелинейности.
Трансмиссии также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, которую видит первичный двигатель и которая отражается на него, в коэффициент, равный квадрату передаточного отношения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции с обеих сторон трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 1983).
Отраженная инерция особенно важна, когда рабочие органы претерпевают быстрые и частые изменения скорости и / или крутящего момента, что очень часто встречается в задачах автоматизации и робототехники. В этих случаях вводится перспектива полосы пропускания, чтобы подтвердить способность системы отслеживать эти изменения (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа управляемости задним ходом, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие с естественной выходной мощности (с обратным приводом).Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, что типично для реабилитационных устройств или экзоскелетов. Как демонстрируют Ван и Ким (2015), управляемость коробки передач задним ходом включает в себя комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и, следовательно, она тесно связана с эффективностью коробки передач.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как ее способности передаточного числа, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за забором в хорошо структурированной среде, где они могут использовать преимущества своих быстрых и точных роботизированных движений, не подвергая опасности сотрудников-операторов.
Безопасный pHRI, включающий возможность безопасного перемещения в неструктурированной / неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из формирования механического импеданса (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением / скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора / пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться в соответствии с требованиями человека (Karayiannidis et al. др., 2015). Это подчеркивает важность импеданса и внутреннего соответствия (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009), где требуется высокая степень соответствия (Haddadin and Croft, 2016).
С точки зрения управления, инерция полезной нагрузки, отраженная к первичному двигателю, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно небольшая инерция ротора первичного двигателя усиливается тем же фактором при отражении в сторону полезной нагрузки, который должен быть добавлен к инерции, возникающей в результате движения роботизированного устройства и груза по соображениям безопасности, а также ограничение рабочих скоростей.
Хотя в большинстве актуаторов pHRI сегодня используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Sensinger et al. (2011) видят большой потенциал робототехники в использовании двигателей с высоким крутящим моментом (бегунок), требующих очень малых передаточных чисел. Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают актуаторы для робототехники, основанные на этих принципах. По их мнению, увеличение инерции двигателя и уменьшение передаточного числа должно приводить к снижению инерции двигателя, отражаемой на рабочий орган, что обеспечивает более высокие рабочие скорости и / или полезную нагрузку без ущерба для целостности оператора.Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют меньшее трение и люфт, уменьшая вклад нелинейностей от коробки передач. С другой стороны, умеренное передаточное число не может компенсировать нелинейные составляющие сцепления — обычно зубчатый момент (Siciliano et al., 2010).
При более внимательном рассмотрении технических характеристик этих новых двигателей возникают некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате чрезмерной тяги к высоким электрическим токам (HALODI Robotics, 2018; GENESIS Robotics, 2020).
Подводя итог, нет полного согласия о том, как лучше всего подойти к безопасному срабатыванию для робототехники. Тем не менее, сильные естественные связи между безопасностью и управляемостью столь же очевидны, как и ключевое значение передаточного числа трансмиссии и ее нелинейностей.
Вес и компактность
Облегченная конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хорошей производительности в новых приложениях робототехники (Albu-Schäffer et al., 2008). Новейшие коллаборативные роботы (коботы), такие как облегченный робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), живут по этому принципу и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов.Благодаря более низкой инерции, легкие коботы обеспечивают более высокую производительность — более высокие скорости — без ущерба для безопасности пользователя.
Этот выгодный аспект облегченной конструкции имеет и другие преимущества. Для мобильных робототехнических систем меньший вес означает большую автономность. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкий вес также является ключевым аспектом для повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характеристика этих новых роботизированных устройств: от коботов до вспомогательных устройств, компактность дает преимущества в маневренности и удобстве взаимодействия.
В роботизированных приложениях, предполагающих тесное сотрудничество с людьми или предоставление мобильных услуг, позиции по своей природе весьма неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих применений с двумя последствиями: первичные двигатели и трансмиссии — обычно самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции имеют тенденцию требовать меньший крутящий момент.
В отличие от веса коробки передач, определение подходящего критерия для оценки вклада коробки передач в компактность системы является более сложной задачей.Физический объем определенно играет роль, но наш опыт показывает, что реальная форма коробки передач имеет тенденцию иметь большее влияние. Еще один аспект, о котором стоит упомянуть, — это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, также могут представлять особый интерес. Поэтому мы решили включить в нашу структуру оценки приблизительную форму (диаметр × длина) выбранной коробки передач, в то время как наличие дополнительного места можно напрямую оценить с помощью предоставленных цифр для каждой из конфигураций.
Эффективность и виртуальная мощность
КПД
В таких областях, как автомобильные или ветряные турбины, эффективность редукторов долгое время находилась в центре внимания. В робототехнике, с другой стороны, эффективность до недавнего времени не становилась ключевым параметром принятия решения при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокий КПД — более низкие потери — позволяют снизить потребление энергии и прямо положительно влияют как на эксплуатационные расходы, так и на экологический след машины или устройства.Для мобильных и носимых роботизированных устройств повышение эффективности также помогает снизить вес системы (требуются батареи меньшего размера) и, в конечном итоге, приводит к большей автономности и лучшему удобству использования (Kashiri et al., 2018).
В коробках передач есть еще одно дополнительное преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, имеют замкнутую форму и используют какой-то контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростями ω Out заблокировано количеством зубцов и определяет его передаточное число i K .В коробке передач без потерь передаточное отношение i τ между выходным и входным крутящими моментами τ точно соответствует обратной кинематической трансмиссии с противоположным знаком. Но в реальной коробке передач наличие потерь изменяет это равенство, и, поскольку кинематическое передаточное число заблокировано числом зубьев, абсолютное значение передаточного числа должно уменьшаться пропорционально потерям:
ωInωOut = iK = — η iτ = -ητOutτIn; где η — КПД системы.Следовательно, высокие потери в коробке передач означают, что меньший крутящий момент доступен для рабочего органа и требуются более высокие передаточные числа для достижения такого же усиления крутящего момента.
Коробки передач подвержены нескольким видам потерь. Чтобы классифицировать их, мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависимые от нагрузки (механические) потери мощности, возникающие из-за скольжения и качения контактных поверхностей как в контактах шестерен, так и в подшипниках, и нагрузки -независимые (спиновые) потери мощности — возникают из-за взаимодействия вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная сила
Термин виртуальная мощность, насколько известно авторам, был первоначально введен Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетных топологиях, долгое время было известно под разными названиями, включая Blindleistung (Wolf, 1958; Mueller, 1998) и скрытая или бесполезная мощность (Macmillan и Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
В соответствии с принципом действия коробка передач всегда включает в себя высокоскоростную сторону с низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Следовательно, его внутренние зубчатые зацепления обычно подвержены либо высокому крутящему моменту и низкой скорости, либо условиям высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их особой топологии некоторые зацепления шестерен могут одновременно встречаться с высокой скоростью и с большим крутящим моментом. Зубчатые зацепления могут легко достичь КПД выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), на этих высоконагруженных сетках появляются неожиданно большие потери. Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое мы в дальнейшем будем называть Топологической эффективностью коробки передач.
Некоторые из вышеупомянутых авторов предлагают методы для оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Chen and Angeles (2006) виртуальная мощность определяется как мощность, измеренная в движущейся — неинерциальной — системе отсчета.Скрытая мощность , представленная Ю и Бичли (1985), соответствует виртуальной мощности, когда опорная система является несущим элементом коробки передач, а виртуальное передаточное число мощности — это соотношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем Latent Power Ratio топологии коробки передач как отношение между суммой скрытых мощностей во всех зацеплениях и мощностью, потребляемой коробкой передач.Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию к возникновению больших потерь за счет зацепления.
Чтобы облегчить понимание практического влияния на общую эффективность топологической эффективности, характеризующейся скрытым коэффициентом мощности, данной конфигурации коробки передач, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полная коробка передач робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к разной эффективности зацепления.Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99% — и позволяют нам упростить наши расчеты с учетом общей уникальной эффективности зацепления η м = 99% во всех зацепляющих контактах в нашем редукторе.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, имел бы только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности внутри этого эталонного редуктора можно легко рассчитать как функцию входной мощности. как:
Таким образом, общая эффективность зацепления всего редуктора соответствует таковой для одиночного зацепляющего контакта:
ηsys, идеально = PIN-PLossPIN = ηm = 99%;Неидеальный редуктор с таким же типовым η m во всех его зацеплениях и со скрытым коэффициентом мощности L, характеризующим его топологический КПД, указывает на то, что общие потери в редукторе могут быть приблизительно определены следующим образом:
Ploss, L≈ PIN * L * (1-ηm)И общая эффективность зацепления всей коробки передач теперь составляет:
ηsys, L = PIN-PLoss, LPIN≈L * ηm + (1-L)Что для η м = 99% и для значения L = 50 дает:
Этот результат следует частично релятивизировать, потому что накопленные потери в первых зацеплениях, задействованных вдоль различных внутренних потоков мощности в коробке передач, приводят к тому, что меньшая виртуальная мощность, прогнозируемая этими уравнениями, будет течь через последующие зацепления.Эффект от этого заключается в том, что КПД обычно будет падать немного медленнее с коэффициентом скрытой мощности, а более реалистичное значение для предыдущего расчета обычно будет между 55 и 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим скрытым коэффициентом мощности требуют чрезвычайно высокой эффективности зацепления: для достижения эффективности системы> 70% системе с L = 100 требуется средняя эффективность зацепления. выше 99.5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность редуктора. Это позволяет нам использовать упрощенный метод расчета коэффициента скрытой мощности, который, в первую очередь, не учитывает влияние на потери, вызванные уменьшением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций редукторов, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важный эффект КПД коробки передач, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности.Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наши обмены с производителями коробок передач показывают, что это обычная практика, она не зависит от входной мощности и легко доступна в технических данных производителя.
Производительность
По сравнению со специальными машинами и машинами для автоматической сборки промышленные роботы не могут достичь тех же стандартов точности и скорости.Оба аспекта пришлось скомпрометировать, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения HRI — это всего лишь еще один шаг в том же направлении: чтобы удовлетворить дальнейшие потребности в гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен на рисунке 1.
Рисунок 1 . Графическое описание перехода основных задач задач от машин через промышленных роботов и коботов к людям-операторам.
Что такое роботизированная автоматизация процессов? Приложение
- Home
Testing
- Back
- Agile Testing
- BugZilla
- Cucumber
- Database Testing
- ETL Testing
- Jmeter 9018 Jmeter Backing
- Jmeter 9018 Jmeter
- Ручное тестирование
- Мобильное тестирование
- Mantis
- Почтальон
- QTP
- Назад
- Центр качества (ALM)
- RPA
- SAP Testing
- Тестирование управления селеном 19
- Soap
SAP
- Назад
- ABAP
- APO 901 89 Начинающий
- Basis
- BODS
- BI
- BPC
- CO
- Назад
- CRM
- Crystal Reports
- FICO MMO
- HANA
- 9019 9019 9019 9018
- Назад
- PI / PO
- PP
- SD
- SAPUI5
- Безопасность
- Менеджер решений
- Successfactors
- SAP Tutorials
- Назад
- Java
- JSP
- Kotlin MY189 Linux MS SQL MS019 js
- Perl
- Назад
- PHP
- PL / SQL
- PostgreSQL
- Python
- ReactJS
- Ruby & Rails
- Scala Back
- SQL Server
- SQL 19
- UML
- VB.Net
- VBScript
- Веб-службы
- WPF
Обязательно учите!
- Назад
- Бухгалтерский учет
- Алгоритмы
- Android
- Блокчейн
- Бизнес-аналитик
- Создание веб-сайта
- Облачные вычисления
- COBOL Назад
9018 9018
Что такое робот?
Обновлено: 02.08.2020 компанией Computer Hope
Робот может относиться к любому из следующего:
1.Робот — термин, введенный Карелом Чапеком в игре 1921 года. рублей (Универсальные роботы Россума). Робот описывает компьютеризированную машину, предназначенную для ответа на ввод, полученный вручную или из окружающей среды. Сегодня роботы выполняют повторяющиеся и часто сложные задачи, такие как сборка автомобилей или компьютерного оборудования.
AI (искусственный интеллект) — это растущая отрасль, и эта технология внедряется во многие области других технологий, включая компьютеры и роботов.Когда-нибудь роботы могут думать самостоятельно и вести себя как люди благодаря ИИ.
Каковы законы робототехники?
Те, кто интересуется роботами, часто обращаются к области робототехники , которая занимается всем, что входит в создание робота. Тем, кто интересуется робототехникой, стоит ознакомиться с законами Азимова, созданными Айзеком Азимовым. Более формально известный как Три закона робототехники , Азимов включает законы во все свои художественные книги, регулирующие разработку и программирование роботов для работы.Многие люди сегодня считают, что эти законы применимы и в реальном мире, а не только в вымышленном. Три закона робототехники , цитируемые из работ Азимова, следующие:
- Первый закон робототехники — Робот не может причинить вред человеку или своим бездействием позволить человеку причинить вред.
- Второй закон робототехники — Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат первому закону.
- Третий закон робототехники — Робот должен защищать свое собственное существование, если такая защита не противоречит первому или второму закону.
Робот — это компьютер?
Нет. Робот считается машиной, а не компьютером. Компьютер придает машине интеллект и способность выполнять задачи.
Чем робот отличается от компьютера?
Робот — это машина, способная управлять своей средой или перемещаться по ней, а компьютер — нет.Например, робот на заводе по сборке автомобилей помогает построить автомобиль, захватывая детали и приваривая их к раме автомобиля. Компьютер помогает отслеживать и контролировать сборку, но не может вносить физические изменения в автомобиль.
Другой пример — думать о своем человеческом теле как о роботе, а о своем мозге как о компьютере. Ваш мозг помогает контролировать ваши руки и ноги, манипулировать физическими объектами и передвигаться. Если вы хотите бросить мяч, ваш мозг визуализирует и планирует необходимые действия.Когда он готов, ваша рука выполняет эти задачи. Ваша рука, бросающая мяч, похожа на руку-робот на сборочном заводе, собирающую машину.
Может ли робот бояться?
Нет. Робот не испытывает эмоций, как человек. Однако программист может запрограммировать робота, чтобы он проявлял человеческие эмоции, которые являются заранее запрограммированными условиями. Например, робот с тепловыми датчиками может испугаться, если его датчик температуры превысит 100 градусов.
Почему веб-сайт спрашивает, робот ли я?
Программные боты созданы для выполнения обычных задач, таких как автоматическая отправка формы для размещения рекламы на веб-сайте.Чтобы защититься от этих ботов, веб-сайт спрашивает, робот ли вы, как CAPTCHA, чтобы определить, человек вы или робот. Эта защита осуществляется путем анализа движений мыши и поиска любых других нарушений, когда пользователь устанавливает флажок Я не робот .
2. Термин робот описывает программное обеспечение или программу, предназначенную для автоматического выполнения задач.
3. В Интернете веб-робот или робот описывает паука.
4. Робот — еще один способ описания ботов.
Android, Cobot (совместный робот), Условия использования оборудования, Условия использования Интернета, Robots.txt
Срок
| Определение | ||
Срок
| Определение | ||
Условие
| Определение
| ||
Термин
| Определение
| ||
Термин
| Определение | ||
Срок
| Определение | ||
Term
| Определение | ||
Термин
| Определение | ||
Термин
| Определение | ||
Срок
| Определение | ||
Срок
| Определение | ||
Срок
| Определение
| ||
Срок
| Определение
| ||
Условие
| Определение
| ||
Срок
| Определение
| ||
Условие
| Определение | ||
Срок
| |||
Что такое коробка передач и для чего она нужна?
Шестерни используются для передачи мощности от одной части машины к другой. В велосипеде, например, именно шестерни передают мощность от педалей к заднему колесу. Точно так же в автомобиле шестерни передают мощность от коленчатого вала (вращающаяся ось, которая получает мощность от двигателя) на ведущий вал под автомобилем, который в конечном итоге приводит в движение колеса.Вы можете соединить вместе любое количество шестеренок, они могут быть разных форм и размеров. Каждый раз, когда вы передаете мощность от одной шестерни к другой, вы можете делать одно из двух:
Велосипедные шестерни Увеличивать скорость : если вы соединяете две шестерни вместе, и у первой шестерни больше зубьев, чем у второй, у второй чтобы не отставать, приходится поворачиваться намного быстрее. Таким образом, такое расположение означает, что второе колесо вращается быстрее, чем первое, но с меньшей силой.
Изменить направление : Когда две шестерни сцепляются вместе, вторая всегда вращается в противоположном направлении.Таким образом, если первый вращается по часовой стрелке, второй должен вращаться против часовой стрелки. Вы также можете использовать шестерни особой формы, чтобы заставить машину поворачиваться на угол. В автомобиле, например, дифференциал (коробка передач в середине задней оси автомобиля с задним приводом) использует коническую шестерню конической формы для поворота мощности ведущего вала на 90 градусов и поворота задних колес.
Если быть очень точным, Коробка передач — это механическое устройство, используемое для увеличения / уменьшения крутящего момента посредством уменьшения / увеличения скорости.Он состоит из двух или более шестерен, одна из которых приводится в движение двигателем. Выходная скорость коробки передач будет обратно пропорциональна передаточному отношению. Коробки передач обычно предпочтительны в приложениях с постоянной скоростью, таких как конвейеры и краны, где они могут обеспечить увеличение крутящего момента.
Коробка передач состоит из ведущей шестерни определенного диаметра, соединенной с приводным механизмом (электродвигатель, ветряная турбина, дизельный двигатель и т. Д.), Соединенной с другой шестерней меньшего размера (если ведомый механизм будет иметь более высокую скорость, чем ведущий единица) или большего диаметра (если скорость ведомого механизма должна быть меньше, чем у ведущего) в сочетании с ведомой механической нагрузкой.Это просто механизм увеличения / уменьшения скорости / крутящего момента или наоборот. Это механическое приспособление для двигателя, вызывающее:
- Преобразует высокую скорость двигателя с низким крутящим моментом в низкий крутящий момент с высокой скоростью (ничего бесплатно даже во время Рождества).
- От низкой скорости / высокого крутящего момента до высокой скорости / низкого крутящего момента.
- Иногда «зубчатая головка» движется на зубчатом ремне или цепи с передаточным числом 1: 1 и используется для уменьшения передачи вибрации двигателя на нагрузку.
- Часто упускают из виду — зубчатая головка уменьшает инерцию нагрузки, видимую двигателем, в квадрате передаточного числа.Например. если установить редуктор с передаточным числом 4: 1, 2000 об / мин будут согласованы с 500 об / мин, но инерция нагрузки будет уменьшена в 16 раз.
- Если вы используете червячную передачу, она добавляет в систему самоблокирующийся механизм (вы не можете перемещать груз, пока двигатель не вращается).
Есть пара других с собственными особенностями (например, шариковая винтовая пара, которая также является головкой шестерни, но мы обычно не называем их головками шестерен). Также обратите внимание, что шестерни не работают бесплатно, что означает, что вы теряете выходную мощность, что означает, что шестерня имеет определенную эффективность.Есть различные типы зубчатых головок: прямозубые, планетарные, одноступенчатые, многоступенчатые, гармонические, прямозубо-эпициклические, (циклоидальные), червячные и т. Д., А также их комбинация, но это отдельная наука.