Принцип работы коробка робот: 6 правил, о которых мало кто знает :: Autonews
устройство и принцип работы. Советы по выбору.
Коробка робот похожа на механическую. Единственным отличием от механики является то, что в коробке робот передачи переключает некий исполнительный механизм (робот). Есть два типа исполнительных механизмов:
- • Гидравлический привод;
- • Электрический привод.
Классическая роботизированная коробка передач была сконструирована в 60-х годах 20 века. Основным ее недостатком является большое время переключения передач, что приводит к толчкам и провалам в динамике автомобиля. Для того чтобы сократить время переключения передач, была разработана коробка с двумя сцеплениями. Стоит отметить, что роботизированная коробка передач с двойным сцеплением является самой распространенной на рынке. Например, всем известная коробка DSG от Фольсксваген является роботизированной коробкой передач с двумя сцеплениями.
Такую коробку можно условно представить состоящей из двух коробок (см. рисунок). Каждая из них со своим сцеплением. Одна коробка передач отвечает за нечетные передачи, вторая – за четные. Коробки существует независимо от друг друга.
Одна коробка передач отвечает за нечетные передачи, вторая – за четные. Коробки существует независимо от друг друга.
Давайте рассмотрим процесс переключения передач. Предположим, вы едете на первой передаче. В то время как вы едете на первой, датчики управления сообщают коробке, что происходит разгон автомобиля и заранее включается вторая передача. Т.е. в момент, когда необходимо включить вторую передачу, она уже включена заранее. И коробка просто выключает первую передачу.
Для наглядности давайте рассмотри процесс переключения передач на классической механике.
- 1. Выжимаете сцепление;
- 2. Выключаете передачу;
- 3. Включаете передачу;
- 4. Отпускаете сцепление.
В коробке робот необходимо выполнить всего два действия:
- 1. Выключить сцепление 1
- 2. Включить сцепление 2.
Получается, что в механической коробке передач необходимо выполнить на два действия больше, чем в роботизированной. Поэтому роботизированная коробка передач быстрее переключает передачи, что сказывается на динамике автомобиля, а также на расходе топлива.
Выводы: Современные роботизированные коробки передач имеют два сцепления. Каждое из которых, отвечает за свои передачи. Эти передачи включаются заблаговременно, а в момент непосредственного переключения управление коробкой просто включает или выключает требуемое сцепление.
На рынке существует два вида сцепления:
- • Сухого типа. Для автомобилей с малой мощностью. Недостаток коробок со сцеплением сухого типа – малый ресурс.
- • Мокрого типа. Для автомобилей повышенной мощности. Работают с использованием масла и рассчитаны на более продолжительный срок службы.
Коробка-робот по сравнению с автоматической коробкой передач имеет несколько преимуществ:
- • Низкий расход топлива;
- • Лучшая динамика автомобиля;
- • Стоимость.
К недостаткам можно отнести:
- • низкий ресурс
- • недостаток квалифицированного ремонта роботизированных коробок передач в СНГ.
Если вы спросите, с какой же коробкой нужно покупать автомобиль? Если рассматривайте покупку нового авто, то мы однозначно рекомендуем коробку робот.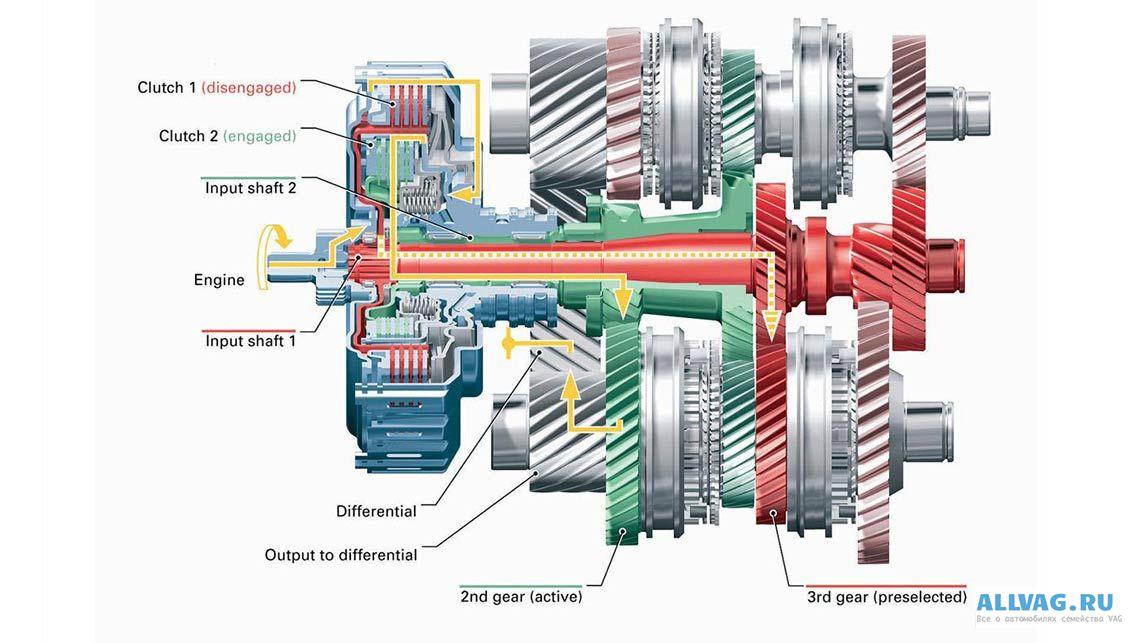 Однако если вы покупаете бэушный авто с пробегом более 200 тыс., то здесь лучше рассматривать вариант покупки либо механики, либо автоматической акпп.
Однако если вы покупаете бэушный авто с пробегом более 200 тыс., то здесь лучше рассматривать вариант покупки либо механики, либо автоматической акпп.
РКПП — роботизированная коробка передач, «робот»
РКПП — роботизированная коробка передач (коробка «робот), которая позволяет выбирать и включать необходимую передачу без участия водителя, то есть автоматически. При этом ошибочно полагать, что роботизированная трансмиссия является одной из разновидностей АКПП (гидромеханический автомат).
Прежде всего, чтобы понять, что такое роботизированная коробка передач, для начала необходимо вспомнить устройство и принцип работы обычной механической коробки (МКПП). Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т.д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.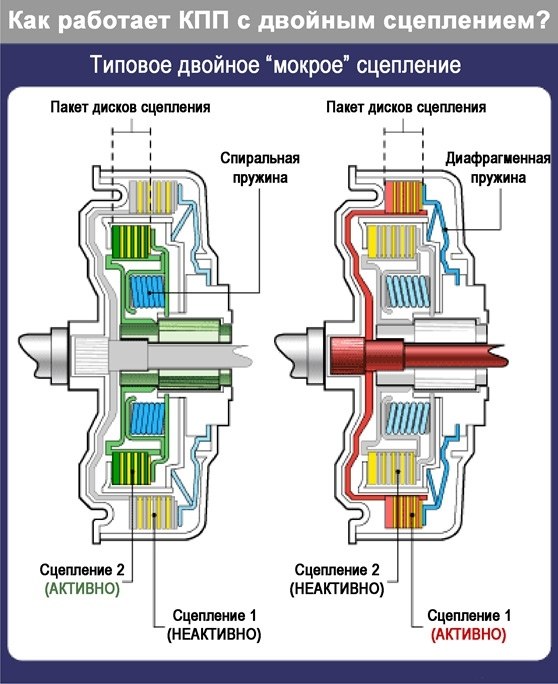
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями. Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т.д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
Как работает роботизированная коробка передач
Что касается принципов работы РКПП, для начала движения и дальнейшего плавного переключения передач необходимо задействовать сцепление (как и в МКПП). Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
В коробке с двумя сцеплениями сначала включается первое сцепление внутреннего первичного вала. Далее актуатор выбора и включения передачи подводит синхронизатор к шестерне первой передачи. В результате шестерня блокируется на валу и начинает вращаться вторичный вал.
После того, как автомобиль начал движение, водитель продолжает нажимать на педаль газа для разгона. В однодисковых роботах с одним сцеплением для включения второй передачи требуется некоторое время, в результате чего возникает характерный «провал».
Чтобы избавиться от такой задержки и сократить время переключений в конструкцию коробки добавили второе сцепление и еще один вал. В результате появилась так называемая преселективная роботизированная КПП.

Подобным образом происходит переключение на последующие высшие передачи, а также понижение передач при езде. При этом время переключения минимально и занимает доли секунды, исключены перегазовки, практически отсутствует разрыв тяги и т.д. Результат — динамичная езда и максимальная топливная экономичность.
Работа в автоматическом режиме становится возможной благодаря тому, что ЭБУ коробкой постоянно анализирует сигналы с внешних датчиков. Блок учитывает нагрузку на ДВС, скорость движения ТС, положение педали газа, пробуксовку колес и т.д.
Также РКПП имеют возможность ручного переключения передач, имитируя работу гидромеханической АКПП в ручном режиме (например, Типтроник). Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Простыми словами, водитель при помощи селектора выбирает режим, при котором ЭБУ коробкой не будет инициировать включение, например, 3 передачи и выше, что помогает преодолевать сложные участки пути (снег, гололед, грязь и т. д.).
д.).
Преимущества и недостатки коробки — робот
Сегодня коробка-робот является достаточно распространенным решением. Например, концерн VAG активно устанавливает подобные коробки, которые знакомы потребителям, как DSG, на разные модели Audi, Volkswagen, Porsche, Skoda и т.д. Также роботизированную трансмиссию массово ставят на модели Ford, Mitsubishi, Honda и машины целого ряда других мировых производителей.
На первый взгляд может показаться, что РКПП имеет только плюсы: надежность и ремонтопригодность «механики», быстрота переключений, топливная экономичность, возможность выдерживать большой крутящий момент и т.д.
При этом по заверениям самих производителей РКПП должны в скором времени полностью вытеснить «классические» АКПП с гидротрансформатором и вариаторные коробки. Однако на практике этого не произошло.
Дело в том, что в плане комфорта работа «однодисковых» роботизированных коробок (с одним сцеплением) далека от АКПП и, тем более, от бесступенчатого вариатора. Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Также ресурс сцепления на «роботе» и актуаторов достаточно низкий (в среднем, около 80-100 тыс. км.). При этом стоимость актуаторов высокая, а ремонтопригодность данных элементов сомнительная. По этой причине многие сервисы практикуют узловую замену, то есть актуатор просто меняется на новый.
Что касается более сложных и дорогих преселективных коробок с двумя сцеплениями, переключения в этом случае более плавные и больше напоминают работу обычной АКПП. Однако ресурс такого «робота» (например, DSG 6 или DSG 7) все равно снижен, нередко возникают проблемы по части механики и электроники, а ремонт в ряде случаев потребует значительных расходов.
В качестве итога отметим, что многие автопроизводители, особенно из Японии, начали постепенно отказываться от установки коробки-робот на свои модели, заменяя ее классической АКПП с гидротрансформатором (ГДТ).
Например, Hondа Civic 8 хэтчбек, который изначально выпускался с РКПП, но в дальнейшем после рестайлинга получил полноценный «автомат». То же самое можно сказать о популярной Toyota Corolla 2007 года, которая позднее получила вместо «робота» автоматическую гидромеханическую коробку.
что это такое и как работает
Благодаря активному развитию автомобилестроения сегодня потребителю доступны несколько типов КПП: традиционная механическая коробка, «классический» гидромеханический автомат АКПП, бесступенчатый вариатор CVT, а также роботизированная коробка передач РКПП.
При этом коробка-робот является самым современным типом среди автоматических трансмиссий. Хотя работы по созданию подобного агрегата велись достаточно давно, успешная реализация и внедрение в массовое производство стало возможным только в последние десятилетия.
В этой статье мы рассмотрим КПП робот, что это такое и как работает, а также какие преимущества и недостатки имеют роботизированные трансмиссии по сравнению с другими видами коробок передач.
Содержание статьи
Роботизированная коробка: устройство и принцип работы
Итак, коробка – робот фактически является обычной механикой МКПП, где выключение сцепления и выбор/переключение передач осуществляется не самим водителем, а автоматикой. Другими словами, процессы в коробке робот, представляющей собой механическую трансмиссию, попросту автоматизированы (роботизированы).
Главным преимуществом робота по сравнению с автоматом или вариатором является то, что данная трансмиссия достаточно проста в производстве, что позволяет снизить начальную себестоимость автомобиля. Также роботизированная коробка передач обеспечивает комфорт (по аналогии с автоматом), отличается высокой производительностью, позволяет добиться топливной экономичности.
С учетом таких особенностей автогиганты повсеместно устанавливают такие КПП на свои модели, причем как в бюджетном, так и в «топовом» сегменте.
- Устройство роботизированной коробки передач в общих чертах представляет собой механическую коробку, которая оснащена отдельными системами для управления сцеплением, а также выбором и включением передач.
Сцепление, по аналогии с МКПП, фрикционного типа, однако диск сцепления может быть одним или же представлять собой так называемый пакет сцепления коробки робот. Еще возможен вариант, когда сцеплений сразу два.
Двойное сцепление устанавливается на преселективных коробках типа DSG или Powershift. Такие трансмиссии выгодно отличатся от обычных АМТ, так как обеспечивают высокий уровень комфорта и передачу крутящего момента без потерь во время переключений (нет разрыва потока мощности).
Часто коробка робот является агрегатом, который создан уже на базе готовых решений. За основу может быть взят гидромеханический автомат, где гидротрансформатор меняется на фрикционное многодисковое сцепление. Еще возможен вариант, где обычная «механика» получает электрический, гидравлический (электрогидравлический) привод сцепления.
Электропривод означает, что используются специальные сервомеханизмы (электродвигатели) и механическая передача. Гидравлический (электрогидравлический) привод работает благодаря наличию в конструкции гидроцилиндров. Эти цилиндры управляются электромагнитными клапанами.
Электрический привод принято считать более простым и дешевым вариантом. При этом его скорость работы (то есть время переключения передач) достаточно низкая. Гидравлический привод заметно быстрее, однако решение требует наличия жидкости в системе под давлением, что увеличивает энергозатраты.
Как правило, робот с электрическим приводом ставится на более простые и дешевые модели, тогда как с гидравлическим приводом на машины среднего и высокого класса.
- Как и в случае с любым другим автоматом, роботизированной коробкой также управляет электронная система. Указанная система состоит из ЭБУ, входных датчиков, а также исполнительных механизмов.
Датчики следят за рабочими параметрами КПП (частота вращения на входе и выходе, в каком положении находятся вилки положение включения передач, режим селектора, температура и давление масла в версиях с гидроприводом сцепления и т. д.)
д.)
Затем данные передаются в ЭБУ коробкой робот, который на основании полученной информации формирует и отсылает сигналы на исполнительные механизмы с учетом заранее прописанных в контроллере алгоритмов. Также коробки с гидравлическим приводом имеют гидроблок (по аналогии с АКПП) для управления гидроцилиндрами и давлением масла в системе.
Коробка робот с двойным сцеплением: особенности
Как уже было сказано выше, робот с одним сцеплением достаточно прост конструктивно, однако его минусом считается большой промежуток времени во время переключения передач. В движении это часто приводит к толчкам, провалам, рывкам и т.д.
Получается, заметно страдает комфорт. В результате была разработана коробка робот с двумя сцеплениями. Такая коробка переключает передач намного быстрее, то есть практически незаметно для водителя. При этом при переключениях передач не происходит разрыва потока мощности, что положительно сказывается на динамике, экономичности и ездовых характеристиках.
Если просто, данная КПП представляет собой сразу две МКПП в одном корпусе. Одна коробка отвечает за четные передачи, тогда как другая за нечетные. Каждая из коробок имеет свое сцепление, что и позволяет заранее выбрать следующую передачу и уже практически включить ее, пока автомобиль еще движется на предыдущей передаче.
Включение происходит почти моментально, а сам агрегат называется преселективная коробка передач (от англ. preselect, что означает предварительный выбор). Преселективный робот с двумя сцепления получился эффективным и компактным, что позволяет ставить данную КПП на разные автомобили.
Двойное сцепление на таких коробках бывает «мокрым» и «сухим». В первом случае пакеты сцепления находятся в масле, тогда как во втором используется сухое сцепление. Отметим, что мокрое сцепление принято считать боле долговечным, тогда как сухой аналог отличается меньшим сроком службы.
Указанные роботизированные коробки, независимо от типа самого сцепления, обычно имеют гидравлический привод сцепления и передач. Использование электрического привода также возможно, однако встречается очень редко.
Использование электрического привода также возможно, однако встречается очень редко.
Как работает роботизированная коробка передач
Все коробки роботы имеют как автоматический, так и ручной режим работы (аналог Типтроник на АКПП). Также роботизированные коробки часто могут быть условно названы адаптивными КПП, так как система управления работает гибко, «подстраиваясь» под индивидуальный стиль вождения.
Еще отметим, что работа в ручном режиме позволяет водителю реализовать последовательное переключение передач «вверх» и «вниз» при помощи селектора, отдельной кнопки на селекторе и/или подрулевых переключателей-лепестков (в зависимости от особенностей и исполнения органов управления КПП). Некоторые РКПП имеют как возможность переключения селектором, так и подрулевыми лепестками.
С учетом особенностей такого режима работы, роботизированная трансмиссия иногда также называется секвентальной коробкой передач (когда переключения можно осуществлять только последовательно).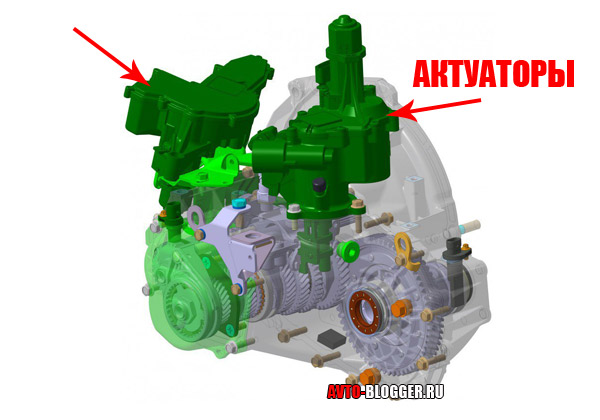
Что в итоге
Как видно, коробка робот представляет собой современное и достаточно эффективное решение. Однако, как и любой другой агрегат, данная трансмиссия не лишена определенных недостатков. Как правило, ответом на вопрос, чем плоха коробка DSG или коробка робот с одним сцеплением, является низкая ремонтопригодность, дороговизна и сложность ремонта, отсутствие запчастей и т.д.
Рекомендуем также прочитать статью о том, как правильно ездить на коробке робот. Из этой статьи вы узнаете об особенностях эксплуатации КПП данного типа, а также что нужно учитывать при езде на машине с роботизированной коробкой передач.В любом случае, данное решение все равно продолжает выглядеть достаточно привлекательно, особенно при покупке нового автомобиля, который имеет официальную гарантию производителя. Если же говорить о приобретении авто б/у с коробкой робот, в этом случае нужно отдельно принимать во внимание тип установленной коробки, ее особенности, срок службы, неисправности и т.д.
Читайте также
Роботизированная трансмиссия (РКПП) и принцип работы коробки
РКПП — роботизированная коробка передач (коробка «робот), которая позволяет выбирать и включать необходимую передачу без участия водителя, то есть автоматически. При этом ошибочно полагать, что роботизированная трансмиссия является одной из разновидностей АКПП (гидромеханический автомат).
Прежде всего, чтобы понять, что такое роботизированная коробка передач, для начала необходимо вспомнить устройство и принцип работы обычной механической коробки (МКПП). Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Содержание статьи
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т. д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями. Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы. Электрический актуатор -электромотор с редуктором, гидравлический является гидроцилиндром, шток которого связан с синхронизатором. Главной задачей как первого, так и второго типа устройств становится механическое перемещение синхронизаторов КПП, а также включение и выключение сцепления.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т.д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
Как работает роботизированная коробка передач
Что касается принципов работы РКПП, для начала движения и дальнейшего плавного переключения передач необходимо задействовать сцепление (как и в МКПП). Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
В коробке с двумя сцеплениями сначала включается первое сцепление внутреннего первичного вала. Далее актуатор выбора и включения передачи подводит синхронизатор к шестерне первой передачи. В результате шестерня блокируется на валу и начинает вращаться вторичный вал.
После того, как автомобиль начал движение, водитель продолжает нажимать на педаль газа для разгона. В однодисковых роботах с одним сцеплением для включения второй передачи требуется некоторое время, в результате чего возникает характерный «провал».
Чтобы избавиться от такой задержки и сократить время переключений в конструкцию коробки добавили второе сцепление и еще один вал. В результате появилась так называемая преселективная роботизированная КПП.
Если просто, пока включена первая передача, вторая уже также готова к включению, так как одновременно задействовано второе сцепление.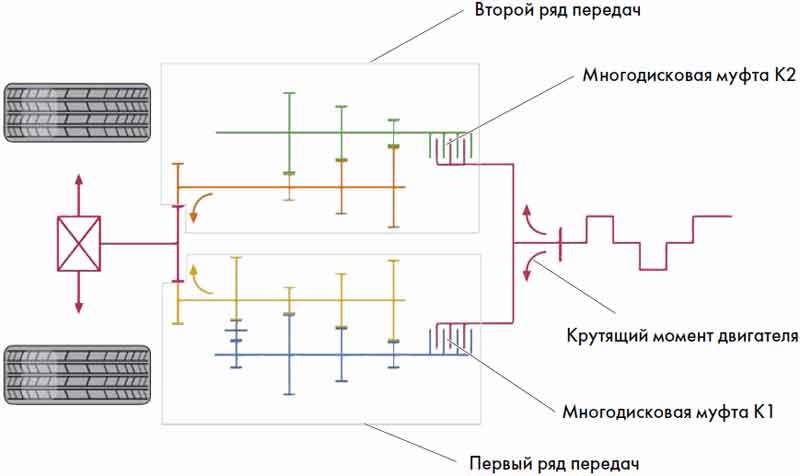 Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Подобным образом происходит переключение на последующие высшие передачи, а также понижение передач при езде. При этом время переключения минимально и занимает доли секунды, исключены перегазовки, практически отсутствует разрыв тяги и т.д. Результат — динамичная езда и максимальная топливная экономичность.
Работа в автоматическом режиме становится возможной благодаря тому, что ЭБУ коробкой постоянно анализирует сигналы с внешних датчиков. Блок учитывает нагрузку на ДВС, скорость движения ТС, положение педали газа, пробуксовку колес и т.д.
Также РКПП имеют возможность ручного переключения передач, имитируя работу гидромеханической АКПП в ручном режиме (например, Типтроник). Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Простыми словами, водитель при помощи селектора выбирает режим, при котором ЭБУ коробкой не будет инициировать включение, например, 3 передачи и выше, что помогает преодолевать сложные участки пути (снег, гололед, грязь и т. д.).
д.).
Преимущества и недостатки коробки — робот
Сегодня коробка-робот является достаточно распространенным решением. Например, концерн VAG активно устанавливает подобные коробки, которые знакомы потребителям, как DSG, на разные модели Audi, Volkswagen, Porsche, Skoda и т.д. Также роботизированную трансмиссию массово ставят на модели Ford, Mitsubishi, Honda и машины целого ряда других мировых производителей.
На первый взгляд может показаться, что РКПП имеет только плюсы: надежность и ремонтопригодность «механики», быстрота переключений, топливная экономичность, возможность выдерживать большой крутящий момент и т.д.
При этом по заверениям самих производителей РКПП должны в скором времени полностью вытеснить «классические» АКПП с гидротрансформатором и вариаторные коробки.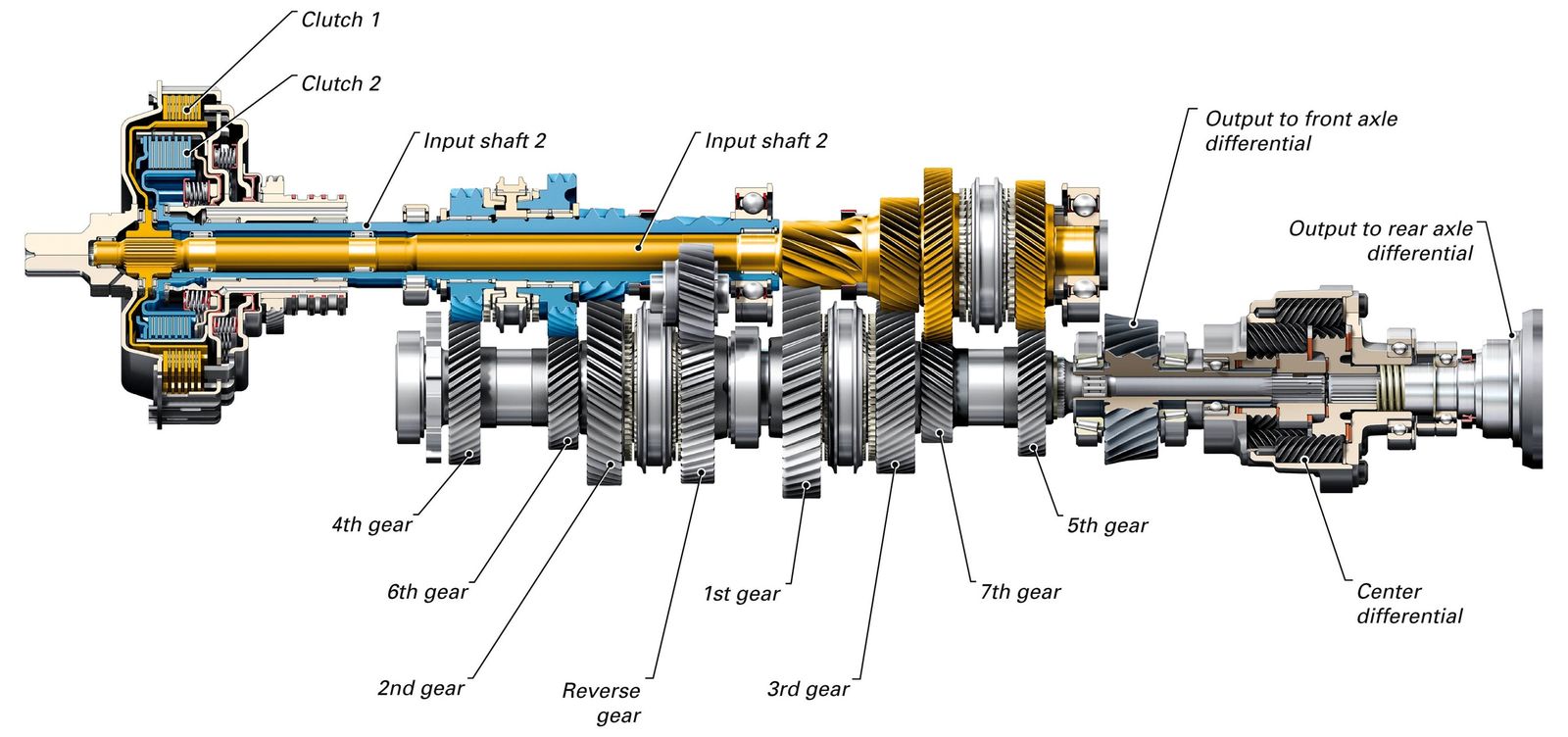 Однако на практике этого не произошло.
Однако на практике этого не произошло.
Дело в том, что в плане комфорта работа «однодисковых» роботизированных коробок (с одним сцеплением) далека от АКПП и, тем более, от бесступенчатого вариатора. Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Также ресурс сцепления на «роботе» и актуаторов достаточно низкий (в среднем, около 80-100 тыс. км.). При этом стоимость актуаторов высокая, а ремонтопригодность данных элементов сомнительная. По этой причине многие сервисы практикуют узловую замену, то есть актуатор просто меняется на новый.
Что касается более сложных и дорогих преселективных коробок с двумя сцеплениями, переключения в этом случае более плавные и больше напоминают работу обычной АКПП. Однако ресурс такого «робота» (например, DSG 6 или DSG 7) все равно снижен, нередко возникают проблемы по части механики и электроники, а ремонт в ряде случаев потребует значительных расходов.
В качестве итога отметим, что многие автопроизводители, особенно из Японии, начали постепенно отказываться от установки коробки-робот на свои модели, заменяя ее классической АКПП с гидротрансформатором (ГДТ).
Например, Hondа Civic 8 хэтчбек, который изначально выпускался с РКПП, но в дальнейшем после рестайлинга получил полноценный «автомат». То же самое можно сказать о популярной Toyota Corolla 2007 года, которая позднее получила вместо «робота» автоматическую гидромеханическую коробку.
Читайте также
Как это работает: роботизированная коробка передач
Одна из ветвей развития механических трансмиссий привела инженеров и конструкторов к созданию роботизированной коробки передач – устройства, в котором передачи переключает не человек (путем включения и выключения сцепления), а «робот» — управляемый электроникой механизм. На данный момент это одна из наиболее прогрессивных типов коробок передач, устанавливаемых на автомобили, у которой, тем не менее, есть свои плюсы и минусы.
Роботизированная коробка DSGПринцип устройства роботизированной КПП
Платформой для создания роботизированной трансмиссии послужила механическая коробка передач. Конструкторы посчитали, что нет смысла выдумывать абсолютно новый механизм, достаточно усовершенствовать уже существующий.
Как известно, принцип работы механической коробки передач заключается в передаче крутящего момента от двигателя через первичный вал на вторичный, от которого крутящий момент попадает на главную передачу, а затем – на ведущие колеса. Момент переключения передач на «механике» осуществляется при помощи механизма сцепления, которым оперирует водитель — выжимая и отпуская сцепление, он руководит переключением передач с пониженной на повышенную, либо в обратном порядке.
В механизме работы роботизированной трансмиссии этот механический момент переключения передачи инженеры решили доверить автоматике, убрав из цепи управления непосредственное участие человека. У «робота» сцеплением и переключением передач ведают специальные узлы-актуаторы, которые бывают двух типов – актуаторы сцепления и актуаторы переключения передач. Первые ответственны за размыкание/смыкание первичного вала с двигателем, вторые – за переключение передач. Актуаторы, в свою очередь, управляются электронным блоком управления, который четко рассчитывает момент, когда должен отключиться/подключиться первичный вал и когда – включиться повышенная или пониженная передача. Когда такой сигнал поступает (при этом, электронный блок управления учитывает скорость движения машины, обороты двигателя, крутящий момент и другие данные), актуатор сцепления отсоединяет первичный вал от двигателя, а актуатор включения передачи выбирает нужную ступень. Затем актуатор сцепления плавно соединяет первичный вал с двигателем и автомобиль двигается на повышенной передаче. Тот же процесс происходит и при переключении с повышенной на пониженную передачу, а также при езде задним ходом. Устанавливались такие трансмиссии на автомобили многих марок (например, Toyota, Peugeot и другие).
Роботизированная» 2-вальная КПП с электрогидравлическими исполнительными механизмами (Citroen). Фото — Carexpert.ruКак и многие механизмы, роботизированная трансмиссия была несовершенной (о ее плюсах и минусах мы поговорим позже) и именно из-за этого автомобили с «роботами» первого поколения не пользовались у покупателей успехом. Ситуация была исправлена с выходом на рынок роботизированных трансмиссий второго поколения – с двумя сцеплениями. Их еще называют преселективными коробками передач.
Преселективный робот DSG с двумя сцеплениями.Первоначально такими «роботами» оснащались автомобили концерна Volkswagen (Volkswagen, Audi, Seat, Skoda), сегодня подобными трансмиссиями оборудуются машины и других марок (BMW, Ford, Fiat). В зависимости от типа сцепления такие коробки делят на КПП с сухим и мокрым сцеплением. Принцип работы такой коробки заключается в том, что четные и нечетные ступени разнесены по разным валам (первичным и вторичным), а их включением ведает отдельный блок сцепления. Механизм такой коробки заранее подготавливает к включению следующую ступень (отсюда и название «преселективная» — предваряющая выбор передачи), благодаря чему эта процедура происходит без отключения КПП от двигателя, тем самым, не прерывается крутящий момент от мотора к ведущим колесам.
Часто возникает вопрос: в чем же различия между автоматической и роботизированной трансмиссией? Ответ прост: в устройстве. Роботизированная коробка передач – это, как было указано выше, та же «механика», только включением/выключением сцепления и переключением передач тут занимаются приводы-актуаторы. В автоматической коробке передач присутствует важный агрегат – гидротрансформатор, который заменяет собой механизм сцепления и является он связующим звеном между двигателем и собственно коробкой передач.
Достоинства и недостатки «роботов»
Положительными сторонами роботизированных коробок передач первого поколения было отсутствие педали сцепления и более низкая, чем у автоматической трансмиссии, цена. Отрицательным аспектом этих КПП был несовершенный механизм включения последующих передач, из-за чего автомобиль дергался, что приносило дискомфорт водителю и пассажирам. Также минусом этой коробки была сложность и относительно высокая стоимость ее обслуживания, которая была выше, чем у традиционной механической трансмиссии.
К плюсам преселективной роботизированной КПП можно отнести скорость переключения передач, экономичность (ввиду отсутствия потери мощности при переключении передач), работу в полностью автоматическом либо «ручном» режиме. К минусам – наличие рывков при езде на первой передаче, дороговизну ремонта и обслуживания. Например, такой характерный для многих «роботов» минус, как откатывание автомобиля назад при трогании в гору (все же роботизированная трансмиссия, несмотря на отсутствие привычного механизма сцепления, является той же «механикой») изрядно нервирует владельцев машин с РКПП и требует привыкания к подобной особенности.
Читайте еще: Поломки Робота
Преселективный «робот» S tronic от Audi.Робот и автомат в чем разница
Начиная с конца 80-х годов прошлого века, инженеры стремятся максимально нивелировать разницу между автоматическими и механическими трансмиссиями.
Одним из результатов такой работы стало появление роботизированной «механики», которая на сегодняшний день присутствует в модельных линейках почти всех крупных автопроизводителей.
Какими же преимуществами и недостатками обладает такой «робот» в сравнении с классическим «автоматом»?
Недостатки и особенности робота
Начнем с конструктивных особенностей «робота», который по сути является механической коробкой передач, но без третьей педали. За выжим сцепления в такой КП отвечает электропривод (актуатор).
В отличие от автоматической коробки с гидротрансформатором, конструкция роботизированной «механики» значительно проще, поэтому и дешевле в производстве. Последнее преимущество сыграло главную роль в быстром появлении «роботов» на многих недорогих моделях.
Но как оказалось, производители немного поспешили с массовым запуском такой трансмиссии на рынок. Все дело в том, что большинство «роботов», особенно при активной езде, не обеспечивали плавного переключения передач, раздражая водителей рывками и задержками при смене ступеней, а также откатом при старте на подъеме. Кроме того, роботизированные КП не могли похвастаться высокой надежностью.
Роботизированная коробка передач с двойным сцеплением
Улучшить плавность «роботов» взялся концерн Volkswagen, внедрив на своих моделях в середине 2000-х годов преселективный «робот» с двумя сцеплениями (DSG). В таких трансмиссиях четные и нечетные передачи, расположены на отдельных валах, оснащенных индивидуальными сцеплениями.
Новый тип КП хоть и стал совсем недешевым в производстве, но избавился от медлительности первых «роботов» и даже смог обеспечить автомобилю динамику разгона лучше, чем у версий с обычной «механикой». В дальнейшем многие ведущие автопроизводители также начали переходить на подобные “автоматы”, заказывая их у ведущих производителей трансмиссий.
Впрочем, в некоторых случаях остались вопросы к надежности отдельных КП данного типа. Но в сравнении с прежним «роботом» плавность и скорость переключений выросла просто несравнимо.
В подтверждение этого превосходства отметим, что в настоящий момент большинство брендов уже отказались от применения «роботов» на базе классических механических КП и в ближайшем будущем такая трансмиссия может уйти в историю.
Помимо «скорострельности», современные роботизированные КП превосходят классические «автоматы» и по экономичности. «Роботы» вполне способны помогать двигателю расходовать топливо на уровне версий с «механикой».
Классический автомат
Казалось бы, будущее «гидротрансформаторных автоматов» предрешено, тем не менее, «старая гвардия» не спешит сдавать свои позиции.
Во-первых, развитие таких трансмиссий также не стоит на месте. Хотя у многих автолюбителей «классическая» АКП ассоциируется с морально устаревшими четырехступенчатыми «автоматами», которые не спешат переключать скорости и не особо заботятся об экономии топлива.
На самом деле такие коробки передач встречаются сейчас только на бюджетных моделях, да и то довольно редко. Подавляющая часть «автоматов» сегодня имеют минимум шесть скоростей и предлагают функцию ручной смены передач.
Более такого, производители активно увеличивают количество ступеней в таких КП, чтобы добиться лучшей экономичности. На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
Большинство «роботов» не могут справиться с большим крутящим моментом мощных двигателей. Конечно, можно привести пример нескольких суперкаров с роботизированными КП, включая 1000-сильный Bugatti Veyron, но это скорее исключения, подтверждающие правило, тем более, что владельцы спортивных авто не особо беспокоятся о длительности ресурса таких КП.
Также роботизированными трансмиссиями не оснащаются полноценные внедорожники, потому что на сроке службе «роботов» негативно сказываются продолжительные пробуксовки на бездорожье и рывки из-за изменения сцепных свойств при контакте четырех колес с дорогой. Все это по большому счету не очень полезно и для обычных АКП.
Автомат или робот
Разница между «классическим автоматом» и «роботизированной» механикой с каждым годом уменьшается. Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
Похожие записи
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Роботизированная коробка Тойота: принцип работы коробки Toyota
За основу трансмиссии Freetronic была взята традиционная «механика» оснащенная электроприводами. Другое известное название «робота» Freetronic — ММТ (Multimode). Роботизированная трансмиссия может работать как в режиме «автомат», так и в ручном режиме.
Переключение передач в трансмиссии происходит при помощи трех электродвигателей. Один из них отвечает за выключение (выжим) сцепления, а два других за смену передач. Работой приводов управляет электронный блок управления (ТСМ), путем обработки сигналов с бесконтактных датчиков.
Трансмиссией Freetronic комплектовались автомобили марки Toyota с 2005 по 2009 гг. Это такие модели как: Corolla, Auris, Yaris, Aygo,Echo, Prius и другие. На моделях Yaris и Echo концерн Тойота впервые стал устанавливать автоматическое сцепление TFT.
Общее устройство
1 — индикатор в автомобиле, 2 — концевой выключатель рычага КПП, 3 — привод, 4 — датчик 1-2, 5 — датчик заднего хода, 6 — датчик нейтрали, 7 — датчик частоты вращения (КПП), 8 — датчик положения сцепления, 9 — электронный блок управления MMT — Фритроник.
Выключение и включение сцепления TFT в трансмиссии Freetronic происходит путем управления величиной давления жидкости, которая подводится к главному цилиндру сцепления. Коробка переключения передач оснащена датчиками, одни из которых следят за реальным положением селектора передач, а другие измеряют частоту вращения первичного вала КПП. Рычаг переключения оснащен концевыми выключателями упреждающими блок управления о намерениях водителя задействовать рычаг коробки переключения передач. При наличии неисправностей на панели приборов начинает мигать индикатор. Индикатор также сигнализирует водителю при его попытке неверного переключения.
Принцип работы роботизированной коробки Toyota
- До запуска двигателя сцепления всегда включено
- Пуск. После поворота ключа в положение зажигание (положение КПП – нейтраль) блок ММТ выполняет «выжим» сцепления и можно запускать двигатель
- Начало движения. При включении первой передачи или передачи заднего хода и нажатии педали газа, блок ММТ мгновенно получает информацию об этом путем сигнала от датчиков и выдает команду золотниковому клапану на понижение давления, что ведет к включению сцепления и автомобиль трогается. Для плавного включения сцепления клапан золотника открывается постепенно, и полное его включение происходит после выравнивания частоты вращения коленвала и первичного вала КПП. Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
- Смена передач. При отпускании педали газа и изменении положения рычага КПП, соответствующие датчики сообщают об этом в блок ММТ. Блок дает команду на «выжим» сцепления. Дальнейшее включение сцепления происходит после получения сигналов от датчиков нейтрали и «концевиков» рычага.
- Остановка. В момент торможения автомобиля входной вал КПП начинает вращаться с меньшим числом оборотов (ниже заданной нормы) и блок управления TFT выполняет «выжим» сцепления.
- Зуммер. Включается при возникновении внештатных ситуаций: ошибка при переключении вниз, попытка начала движения с передачи выше 3-й, чрезмерная нагрузка на сцепление, попытка запуска при включенной передаче, открыта дверь водителя при запущенном двигателе и положении рычага селектора соответствующее движению вперед или назад ( не нейтраль).
[информация о продукте] Введение в принцип работы автоматической машины для упаковки в картонные коробки
Компания HennoPackaging Technology занимается разработкой и производством оборудования для автоматизации конечной стадии производственной линии. Это помогло многим компаниям создать высокоэффективное оборудование для упаковочной линии, включая машины для установки пакетов, высокоскоростные горизонтальные машины для сборки ящиков, упаковщики ящиков и т. Д. Здесь мы выбираем оборудование для упаковки в картонные коробки, чтобы описать, как оно работает.
Во-первых, что такое упаковочная машина
, автоматическое оборудование, которое сочетает в себе автоматическую подачу продукта (мешок, бутылка, ящик или другой фасонный продукт), автоматическую подачу, автоматический подсчет, автоматическое выравнивание по определенному устройству и т. Д.особенность наполнения товара в коробку специальной конструкцией.
Во-вторых, принцип работы
Материал сначала транспортируется высокоскоростной лентой или гибкой конвейерной линией. Когда фотоэлектрическое обнаружение обнаруживает материал, автоматический серворазделительный механизм назначает материал в соответствии с заданным способом размещения, а затем путем подачи этих материалов во временное хранилище. В соответствии с потребностями внутренней компоновки коробки, разработайте специальную конструкцию захвата, чтобы материал заполнял коробку с образованием различных компоновок.После того, как картонная коробка заполнена, она транспортируется в картонатор для запечатывания картонной коробки.
В-третьих, технические характеристики
1. Китайско-английский человеко-машинный интерфейс, простой в эксплуатации и интуитивно понятный;
2. Подача контролируется серводвигателем, позиционирование точное, материалы аккуратно разложены;
3. Интеграция линейных направляющих удобна для обработки и отладки, а очистка удобна и чиста;
4. Конвейер позиционирования коробки зажимает коробку в двух направлениях, и позиционирование точное;
5.Для обеспечения массового производства
можно одновременно загружать несколько коробок с различной производственной скоростью. 6. Дополнительные станции обработки дополнительно конфигурируются для продуктов разной формы, например, порошковые продукты будут иметь механизм прессования, чтобы избежать ситуации, когда материал находится выше чем коробка и уплотнение не плоское.
4, Описание действий по упаковке всего картона
1. Монтажник коробки начинает работу заранее, коробка распаковывается, лента наклеивается на дно коробки и транспортируется конвейером в положение под картонажной машиной. , ожидая, пока картон поместит материал в коробку.
2. Картонный упаковщик начинает работать, в основном применяя метод присоски, захватного типа, капельного типа, цепного типа и т. Д. Пройдя серию формования перед упаковкой, материал был отсортирован по форме, подходящей для загрузки в картонную коробку, взявшись за руку (присоску). Затем поместите продукт в картонную коробку в соответствии с определенной рабочей процедурой.
3. После завершения упаковки конвейер транспортирует упакованный продукт к автоматической машине для складывания и запечатывания.После того, как фотоэлектрический переключатель обнаруживает прибытие коробки, он автоматически складывает верхнюю крышку коробки и запечатывает ленту.
5. После завершения запечатывания конвейер перемещает коробку на автоматическую упаковочную станцию и автоматически начинает упаковку.
6. После того, как две ленты закончены в соответствии с запрограммированной процедурой, поддоны транспортируются на задние поддоны и завершаются роботом-укладчиком. На следующем этапе будет использоваться вертикальная обвязочная машина для поддонов или горизонтальная обвязочная машина для связывания ПЭТ-ленты.Для повседневных химических продуктов, пищевых продуктов и т. Д., Как правило, они также оснащены упаковкой для упаковки в стретч-пленку на поддонах для защиты от воды. На этом процесс упаковки завершен, и вилочный погрузчик отправляет весь продукт на склад.
Щелкните здесь, чтобы просмотреть на этом сайте более практичное содержание машины для упаковки в картонные коробки.
Что такое робот-подборщик?
Роботы для захвата и размещения обычно используются в современных производственных средах.Автоматизация подбора и размещения ускоряет процесс подбора деталей или предметов и их размещения в других местах. Автоматизация этого процесса помогает увеличить производительность. Роботы для захвата и размещения выполняют повторяющиеся задачи, позволяя людям сосредоточиться на более сложной работе.
Как работают роботы по подбору и укладке
Обычно роботы по подбору и укладке устанавливаются на устойчивую стойку и располагаются так, чтобы достигать различных участков для выполнения работы. Они используют передовые системы зрения для идентификации, захвата и перемещения объектов из одного места в другое.Имея множество вариантов конструкции, роботы для захвата и размещения могут быть сконфигурированы с различными вариантами инструментов на конце руки для использования в различных приложениях, таких как сборка, упаковка или сбор мусора. Например, роботов для подбора и размещения можно использовать для подбора предметов для заказа и помещения их в коробку для упаковки, или их можно использовать для подбора деталей, необходимых для сборки, и перемещения их в следующее место.
Типы роботов для захвата и размещения
Существует несколько типов роботов для захвата и размещения, в том числе:
- Роботизированная рука — Роботизированные руки являются наиболее распространенным типом роботов для захвата и размещения.5-осевой робот-манипулятор может использоваться для стандартных задач захвата и размещения, когда объекты собираются и перемещаются в другие места в одной плоскости. 6-осевой робот-манипулятор используется для более сложных приложений, например, когда объекты необходимо повернуть или переориентировать перед размещением в другом месте.
- Декартова — Как 6-осевая роботизированная рука, декартовы роботы работают в нескольких плоскостях. Эти роботы перемещаются по трем ортогональным осям (X, Y и Z) с использованием декартовых координат.Они могут быть сконструированы с любым типом линейного привода и несколькими типами приводных механизмов, такими как ременные, шариковые или ходовые винтовые механизмы. Как правило, они имеют лучшую точность позиционирования по сравнению с 6-осевыми роботизированными манипуляторами.
- Delta — Роботы Delta, которые часто используются в приложениях, где роботы собирают элементы группами и помещают их в шаблоны сборки или контейнеры, обладают передовыми технологиями технического зрения, которые позволяют им различать различные размеры, формы и цвета. Есть несколько конфигураций роботов Delta, но большинство из них имеют три руки, которые работают по четырем осям.У них есть тяжелые двигатели, прикрепленные к раме, с легкими рычагами, соединенными с соединительными стержнями с шарнирами на обоих концах каждого рычага (обычно шаровыми шарнирами), чтобы обеспечить движение.
- Fast Pick — Роботы Fast Pick идеальны для использования в средне- и крупносерийных приложениях с высокоскоростными SKU. Роботы для быстрого подбора полностью автоматизируют процесс подбора, освобождая человеческий персонал, чтобы сосредоточиться на более эффективных действиях. Они идеально подходят для быстро продвигающихся товаров для пополнения запасов, таких как рекламные товары, добавленные к заказам, или аккумуляторы.Эти роботы могут забирать до 300 SKU в час из пула до 8 SKU.
- Совместная работа — Роботы для совместной работы дополняют работу людей, помогая сотрудникам выбирать места и направляя их при выполнении каждой задачи. Оптимизируя маршруты в режиме реального времени и удерживая сотрудников при выполнении задач, совместные роботы помогают сотрудникам работать более эффективно.
Приложения для роботов по подбору и размещению
Роботы по подбору и размещению часто используются в производстве, но также используются в таких приложениях, как упаковка, сбор и контроль ящиков.Вот некоторые из наиболее распространенных приложений для роботов, занимающихся подбором и размещением, и способы их использования.
- Сборка — Роботы для захвата и размещения, используемые при сборке, захватывают поступающие детали из одного места, например конвейера, и помещают или прикрепляют деталь к другой части изделия. Затем две соединенные детали транспортируются на следующую сборочную площадку.
- Упаковка — Роботы для захвата и размещения, используемые в процессе упаковки, захватывают предметы из входящего источника или обозначенной области и помещают предметы в упаковочный контейнер.
- Сбор ящиков — Роботы для захвата и размещения, используемые в приложениях по сбору ящиков, захватывают детали или предметы из ящиков. Эти роботы для захвата и размещения обычно имеют передовые системы технического зрения, позволяющие им различать цвет, форму и размер, чтобы выбирать нужные предметы даже из ящиков, содержащих случайно перемешанные предметы. Затем эти детали или элементы отправляются в другое место для сборки или упаковки.
- Инспекция — Роботы для захвата и размещения, используемые для инспекций, оснащены передовыми системами технического зрения, позволяющими захватывать объекты, обнаруживать аномалии и удалять дефектные детали или предметы, помещая их в указанное место.
Преимущества роботов для захвата и размещения
Основными преимуществами роботов для захвата и размещения являются скорость и постоянство. Роботов можно настроить в соответствии с конкретными производственными требованиями, и они легко программируются, поэтому их можно использовать для нескольких приложений. Хотя конструкции различаются, роботы для захвата и размещения часто бывают небольшими по размеру и легкими, что делает их идеальными для использования в приложениях с ограниченным пространством.
Роботы для подбора и размещения помогают увеличить объем производства, помогая в процессах подбора и упаковки на складе.Они также обеспечивают хорошую рентабельность инвестиций для производителей. В обоих случаях роботы для подбора и размещения освобождают сотрудников и операторов от монотонной повторяющейся работы, что повышает производительность и снижает физическую нагрузку на рабочих, которая обычно возникает при выполнении таких задач.
Как выбрать подходящего робота для захвата и размещения
Роботы для захвата и размещения могут выполнять практически все операции по перемещению материалов экономически и эффективно — будь то сборка деталей, сбор бункеров или упаковка.Поскольку на рынке доступно несколько конструкций и конфигураций, может быть сложно выбрать тот, который соответствует вашим эксплуатационным потребностям. Чтобы помочь вам принять правильное решение, давайте рассмотрим некоторые факторы и особенности, на которые следует обратить внимание при покупке робота для захвата и размещения.
Число осей
Число осей определяет степень свободы и движения робота захвата и размещения. Как правило, большее количество осей означает большее движение и гибкость, поэтому лучше иметь больше осей, чем меньше.Для приложений выполнения заказов, в которых товары помещаются на конвейер, сборный бункер или непосредственно в упаковочный контейнер, робот должен иметь от четырех до пяти осей. Шесть или более осей предпочтительнее для приложений, в которых робот должен вращаться или перемещаться линейно для выполнения задач в пределах его рабочего диапазона.
Вылет
Вылет — это часть рабочего диапазона, который описывает максимальное расстояние (по горизонтали и вертикали), в пределах которого робот захвата и размещения может обрабатывать предметы.Поскольку робот должен собирать и размещать предметы с высокой точностью, вам следует оценить его радиус действия, чтобы определить, подходит ли он для ваших операций. Максимальный горизонтальный вылет — это расстояние от центра базы робота до самой дальней точки его захвата или настраиваемого конца рычага. Максимальный вертикальный вылет робота измеряется от самой низкой точки, которую может достичь робот (обычно от его основания), до максимальной высоты, которую может поднять запястье.
Повторяемость
Повторяемость описывает способность робота собирать и опускать предметы в одном и том же месте для каждой выполняемой им процедуры.Для высокоточных работ (таких как создание электронной платы) требуются роботы с превосходной повторяемостью и радиусом нулевого допуска. Правильный робот для захвата и размещения должен соответствовать радиусу допуска для вашего целевого приложения — примерно (<0,5 мм) для операций по выполнению заказов.
Скорость
Для повышения производительности и эффективности вам понадобится робот для подбора и укладки, который сможет последовательно выполнять ваши операции по перемещению материалов с необходимой скоростью.В технических характеристиках робота обычно указывается скорость (в градусах в секунду) в диапазоне от 0 до максимальной скорости. Убедитесь, что робот-подборщик может выполнять операции со скоростью (и выше), необходимой для вашей операции. Кроме того, лучше всего приобрести робота для захвата и размещения с максимальной скоростью, который может комфортно справляться с периодами пикового спроса.
Конфигурация и видение
Роботы для захвата и размещения могут быть:
- Шарнирный или шарнирный робот (закрепленный с помощью поворотных рычагов на трех вертикальных осях)
- Сферический робот, обеспечивающий одно линейное и два вращательных движения
- Цилиндрический робот обеспечение движения по горизонтальной, вертикальной и вращательной осям
Хотя большинство роботов для захвата и размещения являются гибкими, они ограничены своими размерами, насадками для работы с продуктом и широтой движения. ВНИМАНИЕ !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!Эти характеристики влияют на то, где они могут быть развернуты и с какими предметами они могут обращаться. Кроме того, система визуального контроля должна быть достаточно сложной, чтобы идентифицировать несколько предметов из пула артикулов.
Полезная нагрузка
Полезная нагрузка — это максимальный вес, который робот может перенести из одной точки в другую. Он включает в себя вес собираемого продукта и вес инструмента, на котором находится рука робота. Робот-подборщик должен уметь поднимать самый тяжелый предмет из вашего инвентаря, полностью вытягивать руку и точно размещать указанный предмет.
Сколько стоят роботы по подбору и размещению?
Логистические операторы могут получить огромную выгоду, разместив на своих складах подходящих роботов по подбору и размещению. В связи с тем, что пандемия коронавируса нарушает цепочки поставок по всему миру, для предприятий как никогда важно автоматизировать деятельность по выполнению заказов, чтобы идти в ногу с растущим спросом потребителей и сокращением предложения рабочей силы.
Роботы по подбору и размещению точно, точно и надежно выполняют задачи по подбору, не делая перерывов и не будучи подверженными усталости, монотонности и отвлекающим факторам окружающей среды.Хотя такая автоматизированная точность должна быть дорогостоящей, предварительная стоимость робота по подбору и размещению по оценкам оценивается в несколько тысяч долларов.
Время установки незначительно, поскольку компаниям не нужно вносить серьезные изменения в инфраструктуру своих складских помещений. Правильные роботы по подбору и размещению могут начать работать почти сразу после того, как они будут установлены и запрограммированы, и могут сразу же начать повышать уровень производительности.
Несмотря на уровень сложных технологий, используемых при создании роботов для захвата и размещения, они требуют минимального обслуживания.Используя надлежащие методы очистки и инструкции по техническому обслуживанию, предприятия могут выполнять все необходимое техническое обслуживание на месте. Это значительно снижает общую стоимость владения роботом-подборщиком по сравнению с другими технологиями автоматизации склада.
Инвестиции в роботов для захвата и размещения позволяют компаниям получить конкурентное преимущество и максимизировать производительность своих предприятий.
Узнайте больше о Fast Lane от 6 River Systems, полностью автоматизированном решении для подбора высокоскоростных SKU.
Что такое шестиосные роботы?
Промышленные роботы имеют различные конфигурации осей. Однако подавляющее большинство шарнирных роботов имеет шесть осей, также называемых шестью степенями свободы. Шестиосные роботы обеспечивают большую гибкость и могут выполнять более широкий спектр задач, чем роботы с меньшим количеством осей.
Ось 1
Эта ось, расположенная в основании робота, позволяет роботу вращаться слева направо.Это широкое движение расширяет рабочую зону, включая область с обеих сторон и позади руки. Эта ось позволяет роботу вращаться на 180 градусов от центральной точки. Эта ось также известна как Motoman: S и Fanuc: J1.
Ось 2Эта ось позволяет нижней руке робота выдвигаться вперед и назад. Это ось, приводящая в движение движение всей нижней части руки. Эта ось также известна как Motoman: L и Fanuc: J2.
Ось 3Ось увеличивает радиус действия робота по вертикали.Это позволяет верхней части руки подниматься и опускаться. На некоторых моделях с шарнирно-сочлененной рамой он позволяет плечу вытягиваться за корпус, дополнительно расширяя рабочий диапазон. Эта ось обеспечивает лучший доступ к верхней части руки. Эта ось также известна как Motoman: U и Fanuc: J3.
Ось 4Работая вместе с осью 5, эта ось помогает позиционировать концевой эффектор и манипулировать деталью. Известный как вращение запястья, он вращает предплечье круговыми движениями, перемещая части между горизонтальным и вертикальным положениями.Эта ось также известна как Motoman: R и Fanuc: J4.
Ось 5Эта ось позволяет запястью манипулятора робота наклоняться вверх и вниз. Эта ось отвечает за движение по тангажу и рысканью. Шаг или наклон, движение вверх и вниз, очень похоже на открытие и закрытие крышки коробки. Рыскание движется влево и вправо, как дверь на петлях. Эта ось также известна как Motoman: B и Fanuc: J5.
Ось 6Это запястье манипулятора.Он отвечает за вращательное движение, позволяя ему свободно вращаться по кругу, как для позиционирования концевых эффекторов, так и для манипулирования частями. Обычно он способен вращаться более чем на 360 градусов по часовой стрелке или против часовой стрелки. Эта ось также известна как Motoman: T и Fanuc: J6.
Нужен шестиосевой робот? Самые популярные шестиосные роботы производятся компаниями Yaskawa Motoman и Fanuc. Чтобы приобрести шестиосного робота, свяжитесь с нашим отделом продаж или позвоните по телефону 740-251-4312.
.www | ГМУНК
Сентябрь 2013 ––
Получившийся короткометражный фильм — единственное в своем роде визуальное и технологическое достижение благодаря особому сочетанию таланта и оборудования за дверями предприятия B&D, и был принят во всем мире с неожиданными похвалами и демонстрацией в Интернете и на других ресурсах. фестивальный цикл — все благодаря огромному количеству любви и страсти, вложенных в проект.
Концепция
–– Проекция В основе пьесы лежали Принципы сценической магии с использованием пяти основных категорий иллюзий. Эти категории во многом определили концептуальную и эстетическую основу и были объединены с эстетикой графического дизайна, наполненной минималистичными формами и иллюминированной фрактальной геометрией.
Затем это направление было помещено в проекционную физическую инсталляцию, где вся «магия» была запечатлена вживую и в камере, снята в документальном стиле без пост-эффектов или обработки, чтобы все казалось подлинным и реальным.По сути, огромные технологии за кулисами полностью скрыты от зрителя методами, используемыми для съемки представления.
Подход к проектированию
–– Теория иллюзий в дизайне Подход к дизайну для фильма заключался в том, чтобы Графика была проинформирована Черно-Белым Искусством Оптических Иллюзий в качестве основного визуального катализатора. Было логично, что визуально, если произведение будет основано на принципах магии и иллюзий, графика также впишется в эту теорию иллюзий в дизайне.Эта эстетика была применена ко всем произведениям искусства в КОРОБКЕ, и она эволюционировала на протяжении всего произведения по мере изучения Принципов, чередующихся между затененной объемной графикой и самосветящейся геометрией.
Во-вторых, дизайн освещения и стиль съемок во многом основывались на эстетике «Нуар» 40-х и 50-х годов, когда использовалась черно-белая палитра и очень стилизованное минимальное освещение для создания очень театрального изображения; поскольку с точки зрения эстетики дизайна имело смысл отдать дань уважения тому периоду для произведения, основанного на такой вневременной форме искусства, как магия.
И, наконец, финальная часть головоломки заключалась в создании звуковой среды, которая способствовала психоделической природе дизайна; по сути, выстраивая эмоциональную дугу по всему произведению, когда оно переходит от таинственных объектов внутри Коробки к ярко освещенной и открытой демонстрации технологий и, в конечном итоге, достигает своей кульминации в виде полностью реализованного перформанса. Мириады аналоговых синтезаторов были использованы самим мастером Soviet Rouge, которые идеально вписывались в концептуальные реплики и визуальную палитру пьесы.
Преобразование
–– Глава 01 Первый принцип Магии, исследуемый в этой пьесе, — это Трансформация, где КОРОБКА трансформируется из одного состояния в другое, во многом как шелковый носовой платок, меняющий цвет, или типичный карточный трюк, меняющий одну масть на другую … В данном случае Трансформация Это было достигнуто за счет того, что КОРОБКА сначала реагировала на прикосновение и жест персонажа, а затем на его движение, в результате чего Геометрия и Объем Коробки разделялись этими действиями.Было исследовано множество визуальных стилей, чередующихся между Затененной графикой, Оп-артом, Освещенными кубами и Каркасами.
Левитация
–– Глава 02Второй принцип Magic — это левитация, где, подобно тому, как фокусник бросает вызов гравитации и парит в нескольких дюймах от пола, холст начинает отрываться от земли и касаться сюрреализма. Появляется еще один холст, и вместе стая сфер взаимодействует с освещенным туннелем, создавая иллюзию левитации объектов и перехода с одного холста на другой.
Ближе к концу раздела сферы возвращаются как одна сверхмощная Электросфера, которая является визуальной кульминацией раздела, затрагивая тему Восстановления, другого Принципа Магии.
Перекресток
–– Глава 03 Третий принцип Magic на самом деле называется «Проникновение», но поскольку мы все — кучка мальчишек, мы не могли справиться с этим названием, поэтому термин «пересечение» использовался для того, чтобы все оставались взрослыми. Для этого принципа, который основан на идее прохождения одного объекта через другой — то есть набора стальных колец, соединяющихся и разъединяющихся, или мечей, проходящих через помощника в корзине — графическое решение заключалось в том, чтобы два холста взаимодействовали друг с другом, в то время как визуализация визуального эффекта «Solid-through-Solid».Таким образом, используя общую центральную область пересечения, было визуализировано множество графических выдавливаний и углублений, чтобы создать глубину и интригу при выполнении этого Принципа Магии.
Телепортация
–– Глава 04 Четвертый принцип Магии — это телепортация, когда маг заставляет что-то перемещаться из одного места в другое — заимствованное кольцо находится внутри клубка шерсти, канарейка внутри лампочки помощник из шкафа в заднюю часть театра, монета из одной руки в другую и т. д.В этом разделе призма постоянно дублирует себя с каждым состоянием внешнего вида, в конечном итоге превращаясь в додекаэдр, который затем переносится между холстами в потоке роботизированного движения.В конце концов, Додекаэдр становится легким объектом и путешествует по длинному глубокому коридору, в конце концов снова распадается на части и падает в глубокую пропасть, выступающую на полу.
Escape
–– Глава 05Пятый и последний Принцип магии, по определению, заключается в том, что мага помещают в ограничивающее устройство (т.е., наручники или смирительную рубашку) или смертельную ловушку, и сбегает в безопасное место. Примеры включают в себя то, что его надевают смирительную рубашку и помещают в переполненный резервуар с водой, связывают и помещают в автомобиль, проходя через автомобильную дробилку.
В приложении BOX Demo персонаж «захвачен» объединенной геометрией холста, а затем раскрывается в Box, где персонаж затем перемещается в объеме, поскольку геометрический свет падает позади него. В подходящем крещендо раскрывается гигантский алмазный портал, где персонаж сбегает из объема, путешествуя по коридору, интерактивное освещение освещает его конечности, когда он уносится к Спасению.
Процесс
–– Сочетание отраслей Процесс создания части был довольно сложным, сочетая традиционные инструменты графического дизайна и анимации с роботизированной анимацией, проекционным картированием, автоматизированной кинематографией и другими технологиями, уникальными для студии. Задача заставить графический дизайн сначала интегрироваться с движениями роботов в физическом пространстве, а затем поддерживать его визуальную точность при проецировании, требовала множества итераций, поскольку то, что хорошо выглядит на экране, не всегда переводится в проецируемые и снятые изображения.В конце концов, была разработана довольно сложная система для визуализации дизайна почти в точности так, как задумано; Да и крутой проектор 4K тоже не повредил. Для получения дополнительной информации в The Creator’s Project есть прекрасная короткометражка о проекте, которую стоит посмотреть.
Воспоминания
–– Дети веселятся Эта команда была одной из лучших на сегодняшний день, и не только из-за огромного таланта каждого члена в соответствующем опыте. С дядей Джеффом, многочасовой и сложной креативной работой, эта команда всегда объединялась, доверяла друг другу и чертовски весело проводила время.
В результате этот восхитительный танцевальный ансамбль был вырезан, чтобы передать дух проекта, мастерски отредактированный единственным и неповторимым Яном Колоном — им действительно понравилась эта калибровочная палочка PhaseSpace. Было очень весело создавать этот невероятно богатый проект; один из лучших когда-либо. Всегда.
Кредитный список BOX
Производственная компания: BOT & DOLLY
Исполнительные продюсеры: Билл Галуша, Ник Рид
Исполнительный креативный директор: Джефф Линнелл
Креативный и технический директор: Тарик Тарик
Директор по дизайну: Брэдли Дж. Манковиц
Ведущие графические дизайнеры: Брэдли Дж. Манковиц, Джейсон Инглиш Керр
3D-художники: Скотт Пагано, Брэдли Дж. Манковиц, Джейсон Инглиш Керр, Конор Гребель
76 Коноринги: , Бен Хокинс, Педро Фигера
Оператор-постановщик: Джо Пикард
Художники по свету: Джо Пикард, Фил Рейнери
Проекционный / сенсорный дизайнер: Фил Рейнери
Анимация робототехники: Тарик Абдель-Гавад, Брэндон Кувад Джордж Бэнкс, Майкл Бердсворт
Оператор робототехники: Майкл Бердсворт, Брэндон Круисман 900 03 Изготовление опоры: Мэтт Биттерман, Итан Дейл
Руководитель сценария: Ян Колон
Звукорежиссеры: Джо Пикард, Майкл Бердсворт
PAs: Шон Сервис, Дакота Смит, Нико Мизоно, Эрик Вендел 70003 Патрик Уолш3 Редакторы: Эшли Родхолм, Ян Колон
Музыка / звуковой дизайн: Кейт Руджеро
Звуковое сопровождение: Джоэл Раабе
Исполнители: Тарик Абдель-Гавад, Ирис, Скаут
Control Engineering | Основные принципы коллаборативных роботов
Быстрая установка, простое программирование, гибкое развертывание и безопасная работа — четыре основных принципа, определяющих совместных роботов.Многие люди ошибочно считают, что проектирование коллаборативных роботов связано только с безопасностью; это просто стоимость входа.
Обновление внутренних функций коллаборативного робота усилило каждый из этих четырех основных принципов. Встроенная функция измерения крутящего момента, функции безопасности и повышенная точность позволяют ускорить интеграцию в широкий спектр перспективных приложений. Повышенная повторяемость делает совместных роботов подходящими для точной отделки, сборки и выполнения электронных задач.
Встроенные датчики силы крутящего момента
Коллаборативный робот со встроенными датчиками крутящего момента позволяет сразу же применять крутящий момент и упрощает обучение роботов.
В приложении для полировки с использованием того же инструмента для полировки, что и человек, коллаборативный робот может использовать ручной инструмент. В отдельной демонстрации захват опускается до тех пор, пока не почувствует небольшое сопротивление. Затем открывается и захватывает деталь. Нет необходимости во внешнем датчике для определения контакта со встроенными датчиками крутящего момента силы.
Сотрудничество человека и машины
Производство должно учитывать человеческую ценность и безопасность, мастерство и понимание потребителей, материалов и процессов.Это основные составляющие создания стоимости фабрики. Эту ценность создают не только роботы; люди, работающие с роботами, также создают большую ценность для компании.
Такие тенденции, как массовая персонализация, предполагают использование технологий для возвращения человеческой ценности, улучшения производства. Совместные роботы — это то, что нужно компаниям для производства персонализированных продуктов, которые требуются потребителям.
В отличие от промышленных роботов, которые заменяют людей автоматизированными процессами, они улучшают человеческое мастерство за счет скорости, точности и точности, необходимых для создания современных продуктов.Совместные роботы несут человеческое прикосновение к массам.
Юрген фон Холлен — президент Universal Robots. Под редакцией Марка Т. Хоске, контент-менеджера, Control Engineering, CFE Media , [email protected].
КЛЮЧЕВЫЕ СЛОВА: Коллаборативный робот, определение силы / момента
Роботы для совместной работы легче интегрировать благодаря встроенным функциям измерения силы и крутящего момента.
Люди и роботы могут совместно работать в производственных приложениях.
Роботы для совместной работы могут улучшить человеческое мастерство за счет скорости, точности и точности.
УЧИТЬСЯ
Как коллаборативный робот может помочь людям в ваших производственных приложениях?
ОНЛАЙН ЭКСТРА
Universal Robots предоставляет дополнительную информацию о линейке коллаборативных роботов серии e.
См. Соответствующие новые продукты для инженеров на сайте www.controleng.com/NP4E
Робот захвата и установки Рука и движение, контролируемое беспроводным радиочастотным модулем
Робот захвата и размещения — это робот, который используется для подъема объекта и размещения его в желаемом месте.Это может быть цилиндрический робот, обеспечивающий движение по горизонтальной, вертикальной и вращательной осям, сферический робот, обеспечивающий два вращательных и одно линейное движение, шарнирный робот или робот-скара (неподвижные роботы с вращающимися руками по 3 вертикальным осям).
Преимущества
Прежде чем двигаться дальше, давайте рассмотрим несколько причин, по которым предпочтение отдается роботам для захвата и размещения:
- Они быстрее и могут выполнять работу за секунды по сравнению с их коллегами-людьми.
- Они гибкие и имеют соответствующую конструкцию.
- Они точные.
- Они повышают безопасность рабочей среды и никогда не устают.
Части робота Pick N Place Robot
Pick N Place RobotДавайте посмотрим, из чего на самом деле состоит робот для захвата и размещения:
- Rover : это основной корпус робота, состоящий из нескольких твердых тел. как цилиндр или шар, шарниры и звенья. Он также известен как манипулятор.
- Концевой эффектор : Это корпус, соединенный с последним шарниром марсохода, который используется для захвата или перемещения объектов. Это может быть аналогия руки человека.
- Приводы : они являются драйверами робота. Это фактически приводит в действие робота. Это может быть любой двигатель, например серводвигатель, шаговый двигатель, пневматические или гидравлические цилиндры.
- Датчики: Они используются для определения внутреннего, а также внешнего состояния, чтобы убедиться, что робот в целом работает плавно.Датчики включают сенсорные датчики, ИК-датчик и т. Д.
- Контроллер : Он используется для управления исполнительными механизмами на основе обратной связи датчика и, таким образом, управления движением каждого сустава и, в конечном итоге, движением концевого эффектора.
Работа простого робота Pick N Place Robot:
Основная функция робота Pick and Place выполняется его шарнирами. Суставы аналогичны суставам человека и используются для соединения двух последовательных твердых тел в роботе. Они могут быть поворотными или линейными.Чтобы добавить шарнир к любому звену робота, нам нужно знать о степенях свободы и степенях движения для этой части тела. Под степенями свободы понимается линейное и вращательное движение тела, а под градусами движения подразумевается количество осей, по которым тело может перемещаться.
Простой робот для захвата и размещенияПростой робот для захвата и размещения состоит из двух твердых тел на подвижном основании, соединенных между собой поворотным шарниром. Поворотный шарнир — это шарнир, который обеспечивает вращение на 360 градусов вокруг любой из осей.
- Дно или основание прикреплено колесами, которые обеспечивают линейное перемещение.
- Жесткое тело 1 st закреплено и поддерживает второе жесткое тело, на котором установлен концевой эффектор.
- Жесткий корпус 2 nd имеет движение по всем 3 осям и имеет 3 степени свободы. Он соединен с корпусом 1 st поворотным шарниром.
- Концевой эффектор должен иметь все 6 степеней свободы, чтобы достигать всех сторон компонента и занимать положение на любой высоте.
В целом, базовый робот для захвата и размещения работает следующим образом:
- Колеса под основанием помогают перемещать робота в желаемое место.
- Жесткое тело, поддерживающее концевой эффектор, изгибается или выпрямляется, чтобы достичь положения, в котором находится объект.
- Концевой эффектор крепко захватывает объект и помещает его в желаемое положение.
Теперь, когда у нас есть краткое представление о роботе для захвата и размещения, основной вопрос заключается в том, как им фактически управлять.
Простым роботом для захвата и размещения можно управлять, управляя движением его рабочего органа. Движение может быть с использованием гидравлического движения, то есть с использованием гидравлической жидкости под давлением для привода робота, или с использованием пневматического движения, то есть с использованием сжатого воздуха для создания механического движения. Однако наиболее эффективным способом является использование двигателей для обеспечения требуемого движения. Двигатели должны управляться, чтобы обеспечить необходимое движение роботу и рабочему элементу.
Рабочий пример управления роботом Pick N Place
Как насчет управления роботом с помощью всего нескольких кнопок на клавиатуре? Да, это возможно! Просто нажав нужную кнопку, мы можем передать роботу команду, чтобы он двигался в любом направлении для достижения нашей задачи.Более того, этого можно достичь с помощью простой беспроводной связи.
Давайте посмотрим, как это работает на самом деле:
Передатчик состоит из клавиатуры, соединенной с микроконтроллером. Любой номер кнопки в десятичном формате преобразуется микроконтроллером в 4-значное двоичное, и параллельный выход на одном из его портов подается на кодировщик. Кодер преобразует эти параллельные данные в последовательные, и они поступают в передатчик, снабженный антенной для передачи последовательных данных.Блок-схема
, показывающая передатчик робота Pick N PlaceСторона приемника состоит из декодера, сопряженного с микроконтроллером. Декодер преобразует полученную команду из последовательного формата в параллельную и передает эти данные микроконтроллеру. На основе этой команды микроконтроллер отправляет соответствующие входные сигналы драйверам двигателей для управления соответствующими двигателями. Блок-схема
, показывающая приемник робота Pick N Place.Система состоит из двух двигателей, обеспечивающих движение всего робота, и двух других двигателей, обеспечивающих движение руки.Необходимо управлять концевым эффектором или захватом, чтобы обеспечить надлежащее давление на объект для эффективного обращения с ним и обеспечения мягкого захвата. Это обеспечивается за счет управления двигателями рычагов с помощью соответствующей команды. Выход двигателей рычага подключается к резистору 10 Ом / 2 Вт, и во время перегрузки двигателя или состояния блокировки на резисторе возникает высокое напряжение, которое вызывает высокий логический уровень на выходе оптоизолятора и прерывание. Контакт микроконтроллера, подключенный к выходу оптоизолятора через pnp-транзистор, получает низкий логический сигнал, который останавливает все остальные операции захвата.
Таким образом, с помощью простой радиочастотной связи мы можем фактически управлять роботом для захвата и размещения.
Практическое применение робота для захвата и установки:
- Защитные приложения : Его можно использовать для наблюдения, а также для захвата вредных объектов, таких как бомбы, и их безопасного распространения.
- Промышленное применение : Эти роботы используются в производстве, чтобы подбирать необходимые детали и размещать их в правильном положении, чтобы завершить крепление оборудования.Его также можно использовать для размещения предметов на конвейерной ленте, а также для сбора дефектных продуктов с конвейерной ленты.
- Медицинские приложения : Эти роботы могут использоваться в различных хирургических операциях, таких как операции по замене суставов, ортопедические и внутренние хирургические операции. Он выполняет операции с большей точностью и аккуратностью.
Помимо этих приложений, эти роботы могут также использоваться в различных других приложениях, подходящих для человечества.
Остается вопрос: как далеко наступит день, когда роботы полностью упростят путь людям?
Робототехника: факты (Science Trek: Idaho Public Television)
См. 10 основных вопросов
Что такое роботы?
Робот происходит от чешского слова «робот», что означает «принудительный труд или труд».«Сегодня мы используем слово« робот »для обозначения любой созданной человеком машины, которая может выполнять работу или другие действия, обычно выполняемые людьми, автоматически или с помощью дистанционного управления. Робототехника — это наука и исследование роботов.
Что делают роботы?
Представьте, что ваша работа заключалась в закручивании одного винта на тостере. И вы делали это снова и снова на тостере за тостером, день за днем, в течение недель, месяцев или лет. Такую работу лучше выполняют роботы, чем люди.Большинство роботов сегодня используются для выполнения повторяющихся действий или работ, которые считаются слишком опасными для человека. Робот идеально подходит для входа в здание, в котором есть бомба. Роботы также используются на заводах для создания таких вещей, как автомобили, шоколадные батончики и электроника. Роботы теперь используются в медицине, в военной тактике, для поиска подводных объектов и исследования других планет. Робототехника помогла людям, потерявшим руки или ноги. Роботы — отличный инструмент для помощи человечеству.
Краткая история
Роботы кажутся современными изобретениями, но на самом деле данные свидетельствуют о том, что автоматизация была создана для всего, от игрушек до деталей для религиозных церемоний в Древней Греции и Риме.Леонардо да Винчи набросал планы робота-гуманоида в конце 1400-х годов. Жак де Вокансон был известен в 18 веке своей автоматизированной фигурой человека, игравшей на флейте, и уткой, которая могла взмахивать крыльями. Многие автоматизированные изобретения, которые могли вести себя аналогично человеку, были задокументированы на протяжении всей истории. Большинство из них были созданы в основном для развлекательных целей. Писатели-фантасты с большим успехом писали о роботах в самых разных ситуациях, а это означало, что робот был частью повседневного разговора и воображения.В 1956 году Джордж Девол и Джозеф Энгельбергер основали первую в мире компанию по производству роботов. К 1960-м годам на автомобильном заводе General Motors в Нью-Джерси были внедрены роботы для перемещения автомобильных деталей. Роботы продолжали развиваться, и теперь их можно найти в домах в качестве игрушек, пылесосов и программируемых домашних животных. Сегодня роботы являются частью многих сфер промышленности, медицины, науки, освоения космоса, строительства, упаковки пищевых продуктов и даже используются для выполнения хирургических операций. Ватсон, робот с искусственным интеллектом от IBM, победил игроков-людей в эпизоде Jeopardy.
Так зачем использовать роботов?
Причина, по которой используются роботы, заключается в том, что их часто дешевле использовать, чем людей, роботам легче выполнять некоторые работы, а иногда это единственный возможный способ выполнить некоторые задачи! Роботы могут исследовать газовые баллоны, вулканы, путешествовать по поверхности Марса или в других местах, слишком опасных для людей, в местах с экстремальными температурами или загрязненной окружающей средой. Роботы могут делать одно и то же снова и снова, не скукая.Они могут сверлить, сваривать, рисовать, могут обращаться с опасными материалами, а в некоторых ситуациях роботы намного точнее, чем человек & тире; что может сократить производственные затраты, ошибки или опасности. Роботы никогда не болеют, им не нужно спать, им не нужна еда, им не нужен выходной, и, что самое главное, они никогда не жалуются! Использование роботов дает много преимуществ.
Части робота
Роботы могут быть изготовлены из различных материалов, включая металлы и пластмассы.Большинство роботов состоит из 3 основных частей:
- Контроллер и приборная панель; также известный как «мозг», которым управляет компьютерная программа. Часто программа очень подробна, поскольку она дает команды движущимся частям робота, которым следует следовать.
- Механические детали и приборная панель; двигатели, поршни, захваты, колеса и шестерни, которые заставляют робота двигаться, хватать, поворачивать и поднимать. Эти части обычно питаются от воздуха, воды или электричества.
- Датчики и приборная панель; чтобы рассказать роботу о своем окружении.Датчики позволяют роботу определять размеры, формы, расстояние между объектами, направление и другие отношения и свойства веществ. Многие роботы могут даже определить величину давления, которое необходимо приложить, чтобы схватить предмет, не раздавливая его.
Все эти части работают вместе, чтобы контролировать работу робота.
Нанороботы
Нанороботы или наноботы — это роботы, уменьшенные до микроскопических размеров, чтобы помещать их в очень маленькие пространства для выполнения определенной функции.В настоящее время наноботы все еще находятся в стадии разработки. Будущие нанороботы могут быть помещены в кровоток для выполнения хирургических процедур, которые являются слишком деликатными или слишком сложными для стандартной хирургии. Наноботы могут бороться с бактериями, отслеживая и уничтожая каждую бактериальную клетку, или могут восстанавливать отдельные клетки органов в организме.
Представьте, если бы наноробот мог нацеливаться на раковые клетки и уничтожать их, не касаясь соседних здоровых клеток. Наноботы, вероятно, будут иметь на борту лекарства и хирургические инструменты.Им нужно будет уметь перемещаться по человеческому телу, а затем тоже находить выход. Наноботов можно использовать и в других ситуациях. Крошечные механизмы и инструменты нанороботов могут позволить создавать объекты мельчайших размеров. Некоторые вещи, которые мы только воображаем в научной фантастике, однажды могут стать реальностью. Может быть, однажды вы станете ученым, который будет работать с нанороботами.
Искусственный интеллект
Искусственный интеллект также известен как машинный интеллект или сокращенно ИИ.Некоторым компьютерам и роботам была предоставлена возможность вести себя как человек. Программное обеспечение для распознавания лиц, сложное программное обеспечение для планирования или компьютерные игры, которые дают игрокам ответ на основе действий игроков, — все это формы искусственного интеллекта. Одно время целью ИИ было воссоздать интеллект человека. В настоящее время интеллект насекомых находится в центре внимания исследований и разработок, потому что насекомых и их поведение легче подражать. Наноботы могут основываться на поведении насекомых, работая стаями вместе, чтобы выполнять определенную функцию.
Некоторым роботам и компьютерам была предоставлена возможность учиться и использовать информацию из предыдущих действий для принятия будущих решений. Робот, заполняющий коробку файлами cookie, может «подсчитать» количество файлов cookie в коробке, или компьютер может определить объем трафика на улице, чтобы вычислить, когда следует изменить свет. Эта наука находится на начальной стадии, но разрабатываются роботы, которые могут принимать решения, чтобы подавать еду, переводить слова с одного языка на другой и получать информацию из внешних источников для решения проблем.
Ограничения для роботов
В отличие от фильмов, роботы не могут думать или принимать решения; они всего лишь инструменты, которые помогают нам добиваться результатов. Роботы — это машины с запрограммированными движениями, которые позволяют им двигаться в определенных направлениях или последовательностях. Искусственный интеллект дал роботам больше возможностей обрабатывать информацию и «учиться». Но они по-прежнему ограничены информацией, которую им дают, и функциями, которые им поручено выполнять.
.